




































































































































































































































































































Stepper motor driver based on the A4988 system. Voltage supply in the range of 8 to 35 V with maximum current consumption of 2 A per coil. Maximum resolution: 1/16 of a step. The module allows for current flow up to 1 A without a radiator.
 Specification:
Specification:
The system allows you to control a stepper motor using a device that allows you to generate the logical states, for example,Arduino,STM32Discovoery,the Raspberry Pi or of anymicrocontroller. The Pololu module is characterized by a very simple operation. In order to rotate the motor one step further, you must specify the STEP with high state (logical one), another sequence of zeros and ones, moves the motor one step further, etc. The choice of direction is accomplished by specifying the state on the DIR lead(e.g. low state - clockwise, high stae - counterclockwise). The driver also has the choice ofresolutionof operation of the engine.
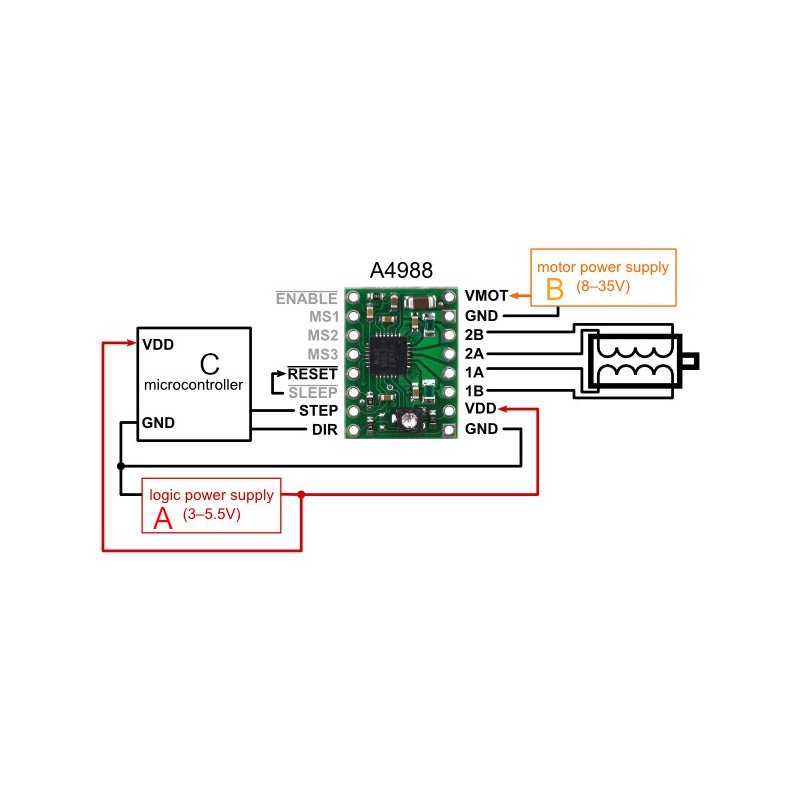
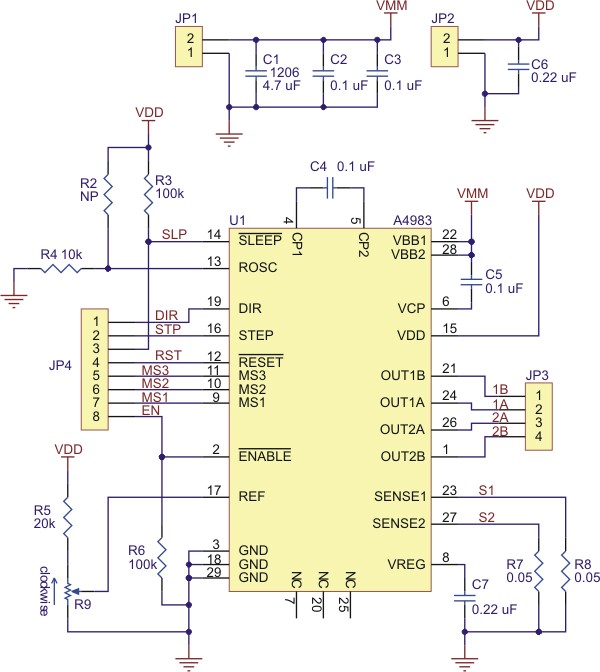
To control a bipolar stepper motor, it is necessary to connect the system in accordance with the figure below. In the case of the control of unipolar engine, you must read theinstructions. If the nominal voltage of the motor is lower than required power source of the driver (8V), you should manually, with the potentiometer, set the current limit.

The illustration shows the minimum connection of the driver. Pin RESET,by default, is not connected, to start the system, it is necessary to indicate the high state on it. This can be done by combining it with an adjacent pin SLEEP.
To power the logic part of the module, you need the voltage which ranges from 3 V to 5.5 V, which should be brought to the pin VDD. The motor supply voltage is in the range from 8 V to 35 V is indicated on the pin VMOT.The system can control the engines with a nominal voltage lower than the required 8 V. In this case, it is necessaryto limit themaximum current consumption through the potentiometer, so as not to exceed the maximum voltage of the motor. For example, for a motor with a resistance of 5 Ωon one coil and a current consumption of 1 A, the nominal supply voltage of 5 V. Power with the voltage of 12 V to limit the current, so it does not exceed 1 A.
|
Attention! The connecting and disconnecting the engine while the driver is turned on, can damage the system. |
The step size is selected via the inputsMS1,MS2,MS3. Possible settings are shown in the table below. Inputs MS1, MS2 and MS3 have internal resistor pull-down (100kOm).
| MS1 | MS2 | MS3 | Resolution |
| low | low | low | Full step |
| high | low | low | 1/2 step |
| low | high | low | 1/4 step |
| high | high | low | 1/8 step |
| high | high | high | 1/16 step |
One pulse specified on thepin STEP causes one step of the motor in the direction selected by indicating the appropriate logic state on the pin DIR. Leads STEP and DIR are not internally pulled up. If the motor should only rotate in one direction, the DIR pin can be permanently connected to VCC or GND.
The system has three other inputs for monitoring power consumption: RESET SLP and EN and their description is indocumentation. Please note that the pin RESET is not pulled to anything. If not used, you can connect it to the adjacent pin SLEEP.
The system can be controlled by the engines with a nominal voltage lower than the required 8 V. In this case, it is necessaryto limit themaximum current consumption through the potentiometer, so as not to exceed the maximum voltage of the motor. For example, for a motor with a resistance of 5 Ωon one coil and a current consumption of 1 A, the nominal supply voltage of 5 V. Power with voltage of 12 V to limit the current, so it does not exceed 1 A.
The A4988 module allows for active current limitation with the potentiometer. One of the ways of the introduction of restriction is to set the driver to full step and measuring the current passing through one coil without indicating the signal at the input STEP. The measured current is 70% of the established limit (both coils are always on and limited to 70% in full step mode). Another way is to measure the voltage at lead REF (marked with a circle on the PCB), as well as the calculation of the current limit (measuring resistors have a value of 0.05Ω). More detail in thedocumentation for the A4988 chip.
The tile was designed so that it can dissipate heat when the current consumption is about 1A per coil. If the current is much higher, use an externalheatsink, to the assembly of which, can be used thermally conductive glue.
The system includes the necessary passive components for the correct operationof the driver. The scheme of connection is shown in the figurs below.
In our offer is also chipA4988.
Useful links |
| Package width | 7.5 cm |
| Package height | 0.5 cm |
| Package depth | 9 cm |
| Package weight | 0.003 kg |
Be the first to ask a question about this product!