Table of Contents:
3D printing, initiated by the RepRap project, in a short period of time revolutionised the technology of manufacturing constructional and decorative elements or everyday objects. Today, printing even the most complicated shapes is practically not a problem – all you need is an appropriate printer and a supply of material. But what to do when you want to recreate a real object or its miniature, and drawing the model by hand is very difficult or even impossible? This article outlines 3D scanning and the most popular 3D scanning methods.
Laser 3D scanning
The most popular method of 3D scanning is laser scanning. In this method, scanning involves creating a representation of a 3D object by creating a point cloud that forms the shape of the object’s surface. The scanner reads the measurement data from the reflected beam of laser light and from an additional moving camera or at least two stationary precision distance sensors. The measurement data collected by the scanner’s sensors are then transferred to the memory of dedicated software, which, based on the measured distances and spatial position of points, generates a 3D object.

When creating a 3D image from a laser scan, the reflection point of the laser beam is usually the brightest pixel of the scanned image representing the 3D object. To minimise the risk of error when scanning in rooms with strong light, the scanner switches the laser on and off to make the necessary comparison. The higher the resolution of the single point scan, the more accurate the representation of the 3D object. Like a video camera, a 3D laser scanner can only capture spatial points that are within its field of view. The scanned image includes the shape of the object, the surface structure, as well as the colours. The entire scanned image of the object, is created from the captured grid of spatial points.
3D scanning using stereovision
3D scanning with stereovision is very advantageous mainly from the cost point of view, but this is unfortunately paid with a lower quality of image accuracy compared to 3D laser scanning. Back-projection of a 3D image by means of stereovision uses two cameras that function similarly to a pair of human eyes. 3D scanning via stereovision, involves capturing the same image fragment from two different viewing angles.
The scanned image is subjected to the necessary correction and filtration, which allows for maximum elimination of errors resulting from digital processing and the most accurate reproduction of the edges of the scanned objects. Then, by comparing the images from the two cameras with each other, the target image is created by means of matching in order to obtain three-dimensional depth. Matching points between images rely on texture variation to find edges and distinguishing features, which can cause problems when surfaces in scanned images do not have high enough contrast or are too similar.
3D scanning – photogrammetry method – extension to stereovision
The photogrammetry method is actually an extension of the stereovision method, which further increases the fidelity of the representation of the scanned image of a 3D object. A photogrammetric 3D scanner is equipped with more than two cameras (as in the case of a stereovision scanner). An important practical advantage of such a scanner, are the relatively long time intervals between individual calibrations. In the photogrammetry method, individual frames of scanned film can be used, which is recorded from multiple positions of individual cameras. This method of scanning 3D images is used, among other things, in the mapping of 3D buildings and in the projection of 3D films.
How a 3D scanner works – structured light scanning
In contrast to laser, stereovision and photogrammetric scanning, structured light scanning does not affect the accuracy of the image texture as significantly. In this method, one of the camera positions used in stereovision and laser scanning is replaced by a projector that projects different light patterns onto the surface of the object and records how the object image distorts the texture of these patterns. The individual points of the target image, are created based on the known position of the camera and information from the pattern of light hitting the object. For this method to be as effective as possible, there must be an exact mapping of the individual pixels (one-to-one) between the projector and camera pixels.
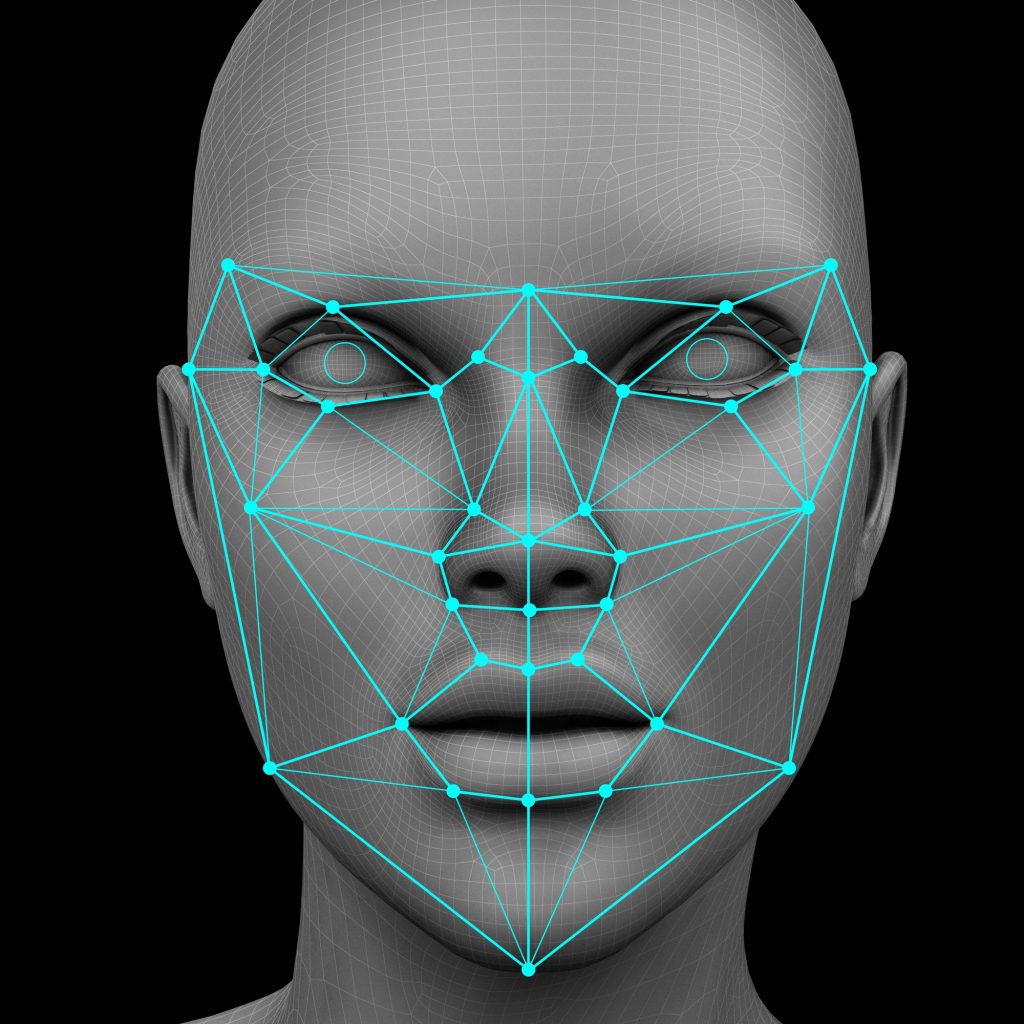
Structured light scanning is used in facial recognition technology, reverse engineering, design, manufacturing and remote recognition of structural elements of the surrounding environment, such as seabed inspection or railway tunnels.
3D scanning – Time-of-Flight (ToF) method
Time-of-Flight measurement is a technique used in distance measuring devices, among others. This method is also used in 3D scanning and consists of sending and receiving pulsed laser light, which creates a 3D model scan. The distance to the scanned object is measured by the total time the laser beam travels from the source to the object and, after the reflection of the beam, travelling back to the laser source. This technique is often used in camera systems for long-range 3D image scanning. The ToF method has very high scanning accuracy, but is very expensive and is usually used for scanning large buildings and outdoor areas.
3D scanning – which method is the best?
Each of the presented methods of 3D scanning allows faithful representation of geometric details of three-dimensional objects and even the structure of the environment, such as indoor spaces or landscapes. Therefore, it is difficult to unambiguously choose which of the 3D scanning methods is the best – each of them has its own advantages, thanks to which it will perform best compared to other methods for a particular type of scanned objects.





