










































































































































































































































































































Metal grip is used as the end of the robotic arms. Adapted to work with modelar servos.
The gripper is made of metal and it can serve as the end of an robotic arm. There are brass bushings in the hinges, which provide increased rigidity and reduce the risk of backlash. Jaws open on approximately 50 mm. The spring mechanism of the clutch protectsthe servo- type medium, protecting from damage. Application of gear speed reducer 2:1 allows you to capture heavier objects. The force of the jaws depends on the servo applied. The gripper, combined with elements typePan/Tilt, creates a complete robotic arm.


|
The set includes a metal gripper.The robotic arm Robotic Claw Pan/Tiltand the compatible servo Servo DGS S90 S05NFcan be purchased separately. |
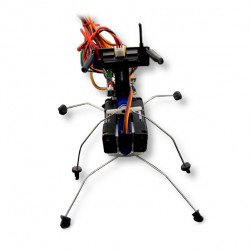
An example of using the Robotic Claw gripper withArduino
The gripper length 130 mm, width 48,5 mm. Jaws open to approx. 50 mm. Weights around 130 g.

The dimensions of the Robotic Claw
Useful links |
| Package width | 15.5 cm |
| Package height | 14.5 cm |
| Package depth | 4 cm |
| Package weight | 0.145 kg |
Be the first to ask a question about this product!











