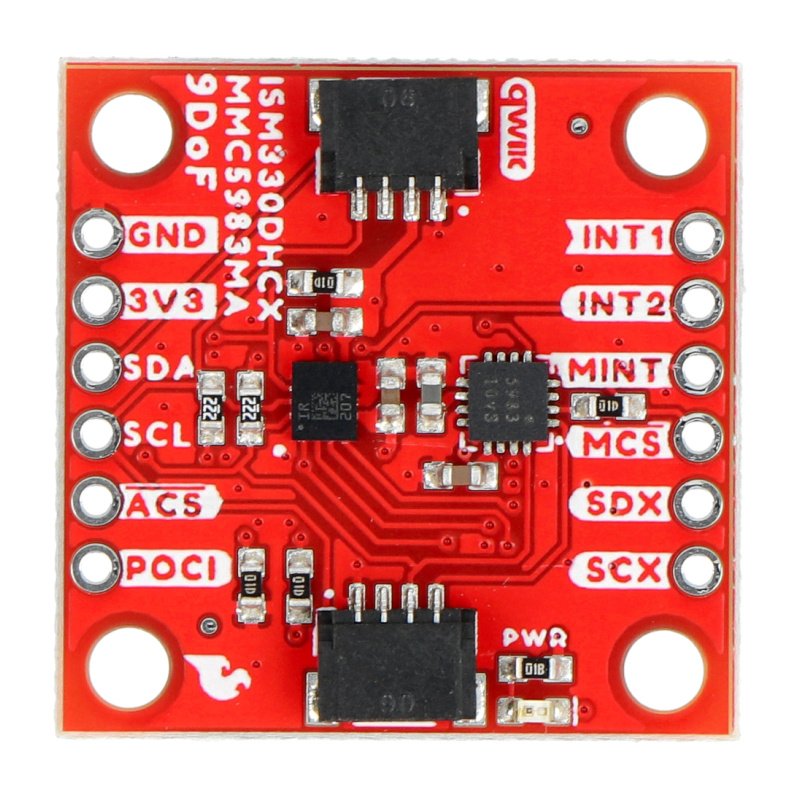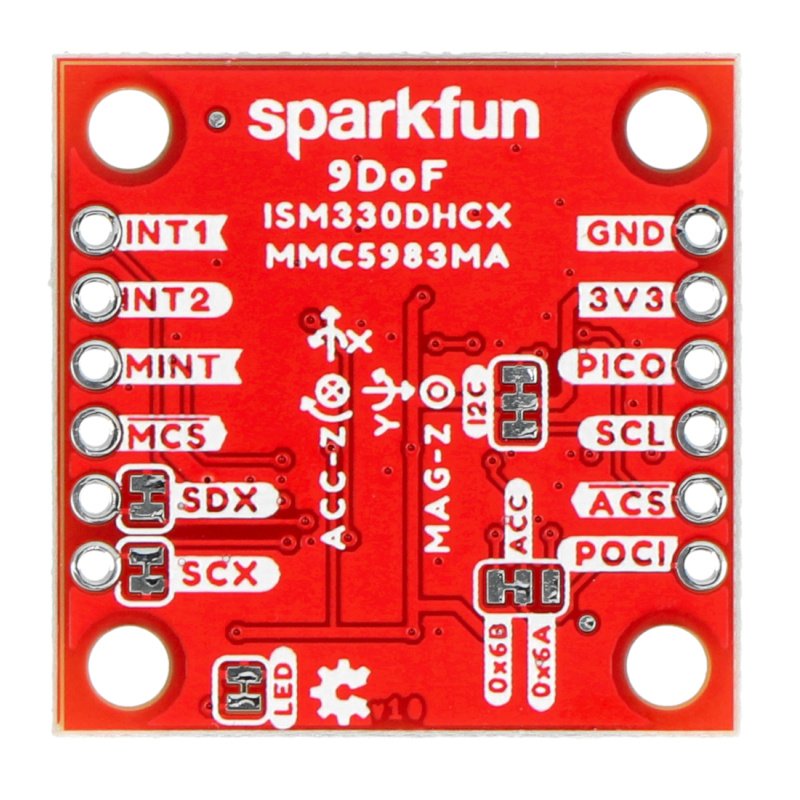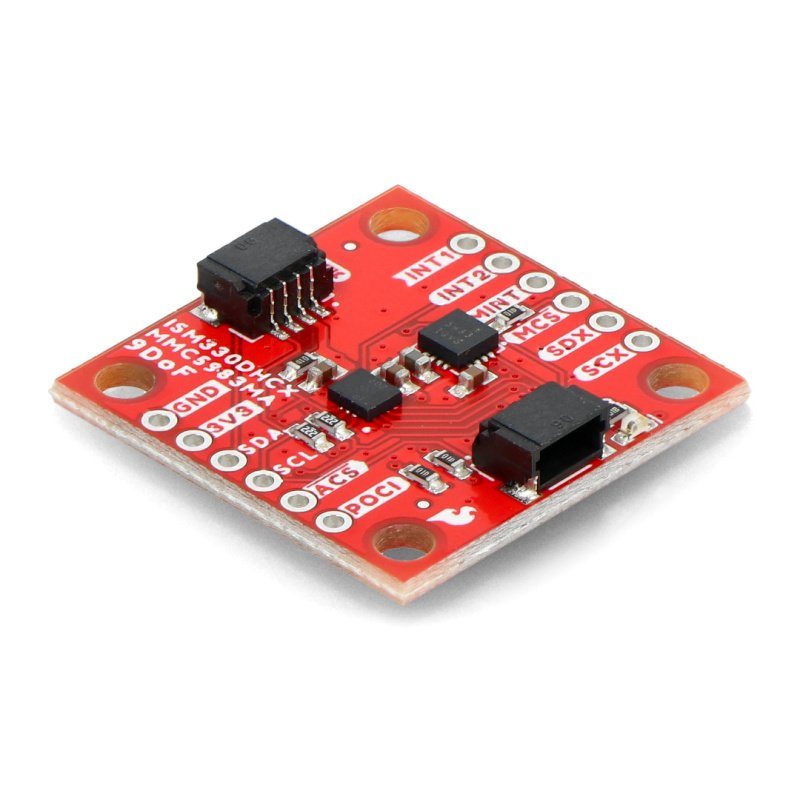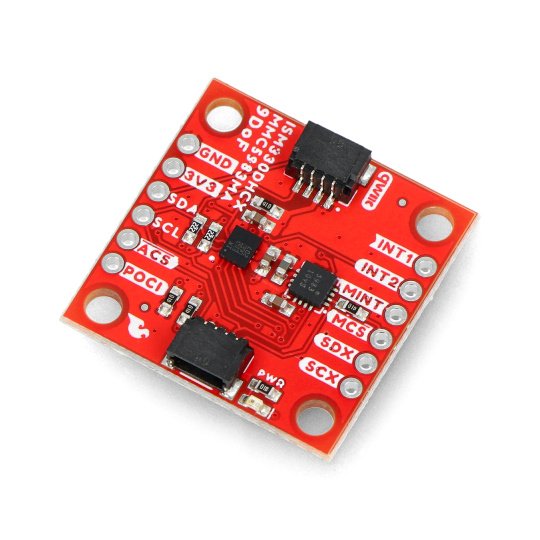
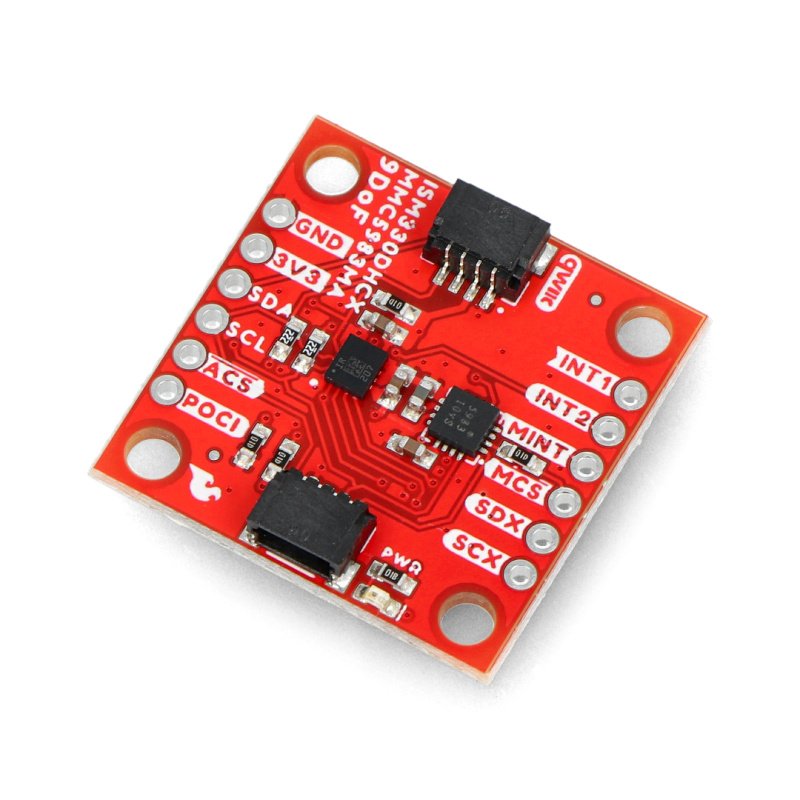




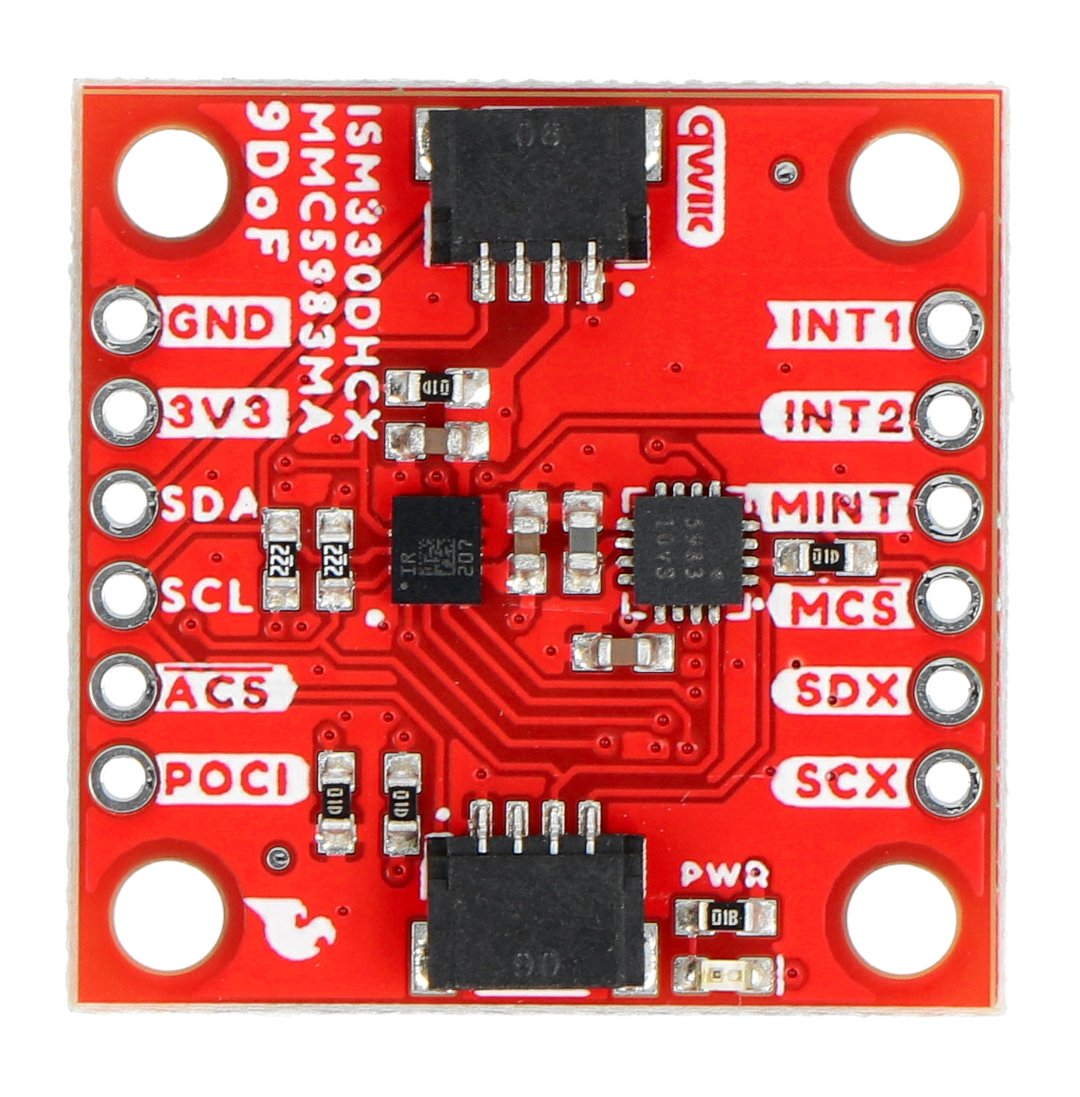
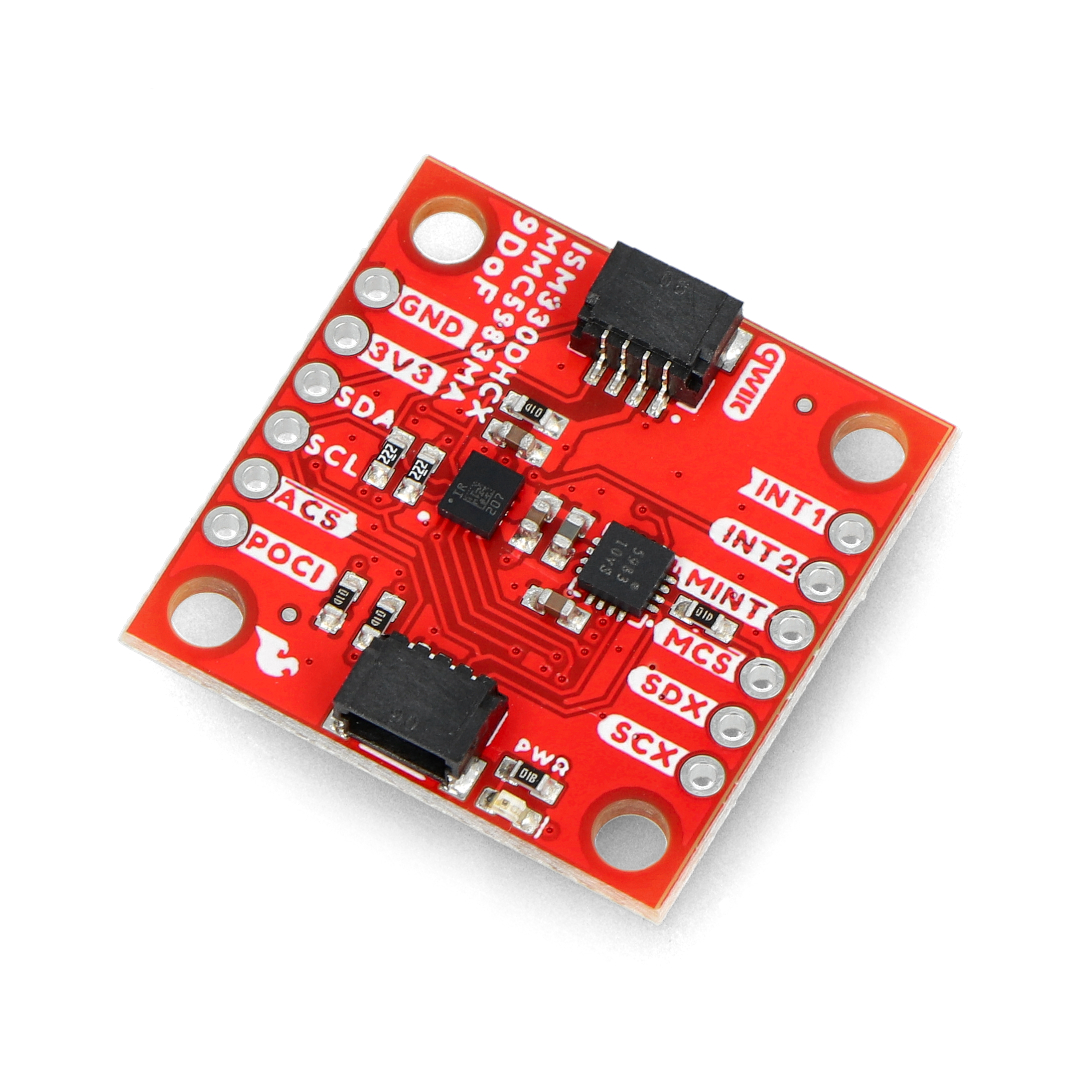
SparkFun Qwiic 9DoF IMU Breakout combines a high-performance digital ISM330DHCX accelerometer , a gyroscope and a highly sensitive three-axis magnetometer MMC5983MA . The module measures linear acceleration in the range of ± 2 / ± 4 / ± 8 / ± 16 g and angular velocity in the range of ± 125 / ± 250 / ± 500 / ± 1000 / ± 2000 / ± 4000 dps . There are also two Qwiic connectors on the board, allowing for a simple connection, without the need for soldering, and outputs in the form of solder pads.
SparkFun sensor 9DoF IMU Breakout - ISM330DHCX, MMC5983MA - Qwiic - SEN-1995.

The board combines a high-performance digital ISM330DHCX accelerometer, a gyroscope and a highly sensitive three-axis magnetometer MMC5983MA.
IMU type sensors are designed to inform about the current location and motion parameters. They use three different sensors for this purpose: an accelerometer, a magnetometer and a gyroscope. They can be found in many applications related to lens stabilization, broadly understood automation and robotics, in navigation systems, as well as during monitoring and vibration compensation.
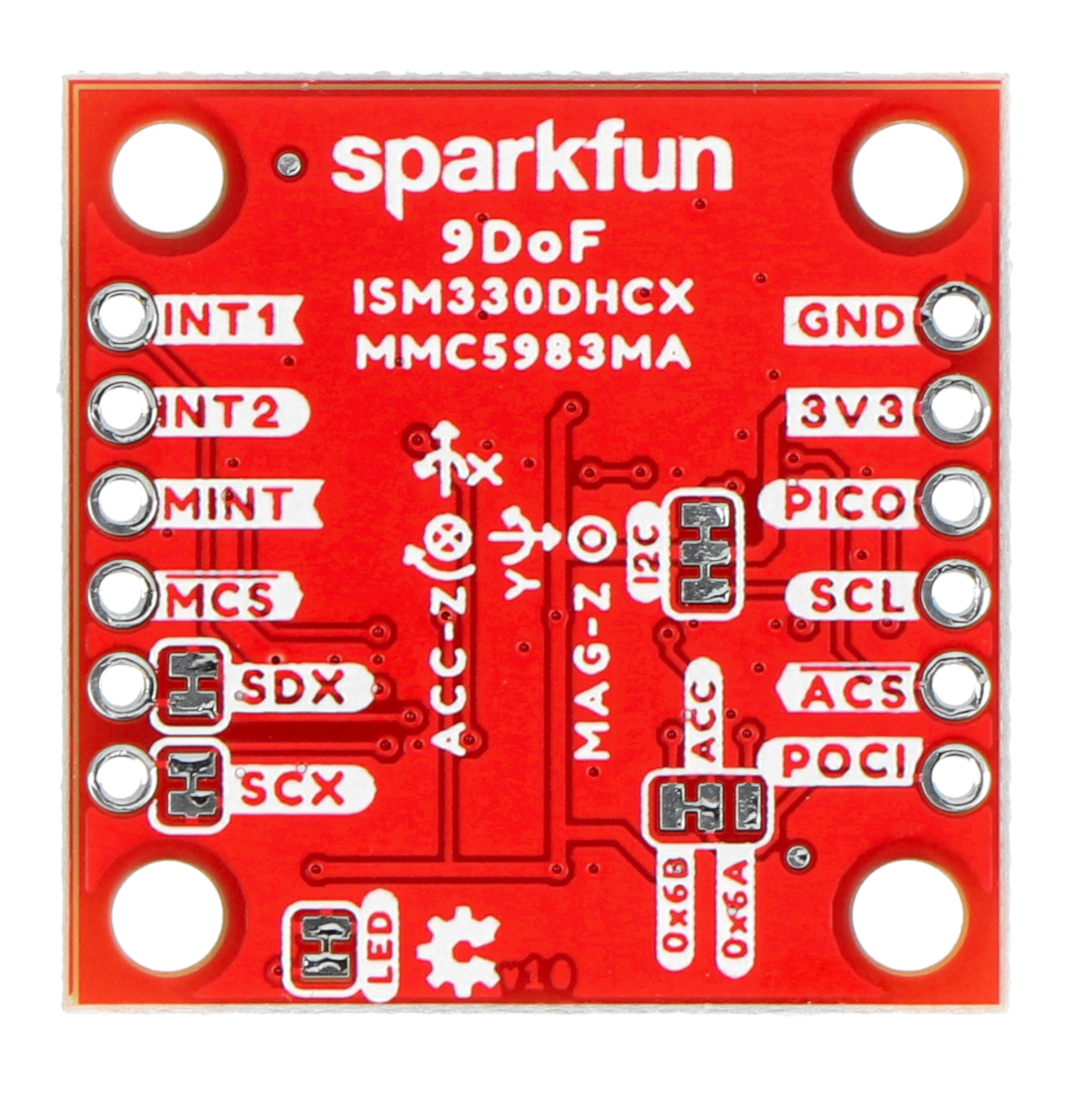
Qwiic SparkFun is an ecosystem that includes numerous sensors based on the I2C bus , executive modules and dedicated cables. The main assumption of this solution is to improve the prototyping process. All elements supporting the Qwiic standard use a common, 4-pin JST connector with a spacing of 1 mm . This reduces the amount of space required on the PCB. It also protects against connection inconsistent with the polarity.
SparkFun Sensor 9DoF IMU Breakout - ISM330DHCX, MMC5983MA - Qwiic - SEN-19895.
Utilizing the handy Qwiic system, no soldering is required to connect the module to the rest of the system.
| Sensor - type | IMU |
| Niebezpieczne | Component |
| Package width | 5 cm |
| Package height | 11 cm |
| Package depth | 1 cm |
| Package weight | 0.003 kg |
Be the first to ask a question about this product!
Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: SparkFun Electronics 6333 Dry Creek Pkwy, Niwot, CO 80503, Stany Zjednoczone
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin