












































































































































































































































































































































Stepper motor driver based on TB67S249FTG chip. Powered by a voltage range of 10 - 47 V, with a maximum current consumption of 4,5 A per coil. Maximum resolution: 1/32 of a step. The module allows up to 1.8 A of current to flow without a heat sink. The controller supports six control interfaces: USB, TTL, I2C, analog, square encoder, RC.
The system allows you to control the stepper motor using a device that allows you to generate logical states, such as Arduino, STM32Discovoery, RaspberryPior anymicrocontroller. The driver can be configured, tested and monitored via USB, runs on Windows, Linux, and macOS.
The Polol module is characterized by very simple operation. To rotate the engine one step at a time,the STEP outputmustbe given a high state (logical one), the next sequence of zeroes and ones will move the engine one step at a time, and so on. The direction is selected by entering the appropriate state on the DIR output (e.g. low state - clockwise rotation, high state - the opposite). The controller also has the ability to select the resolution of the motor.
To control the bipolar stepper motor, connect the system as shown in the figure below. If the nominal motor voltage is lower than the required power supply for the controller (10 V), set the current limit manually using a potentiometer.
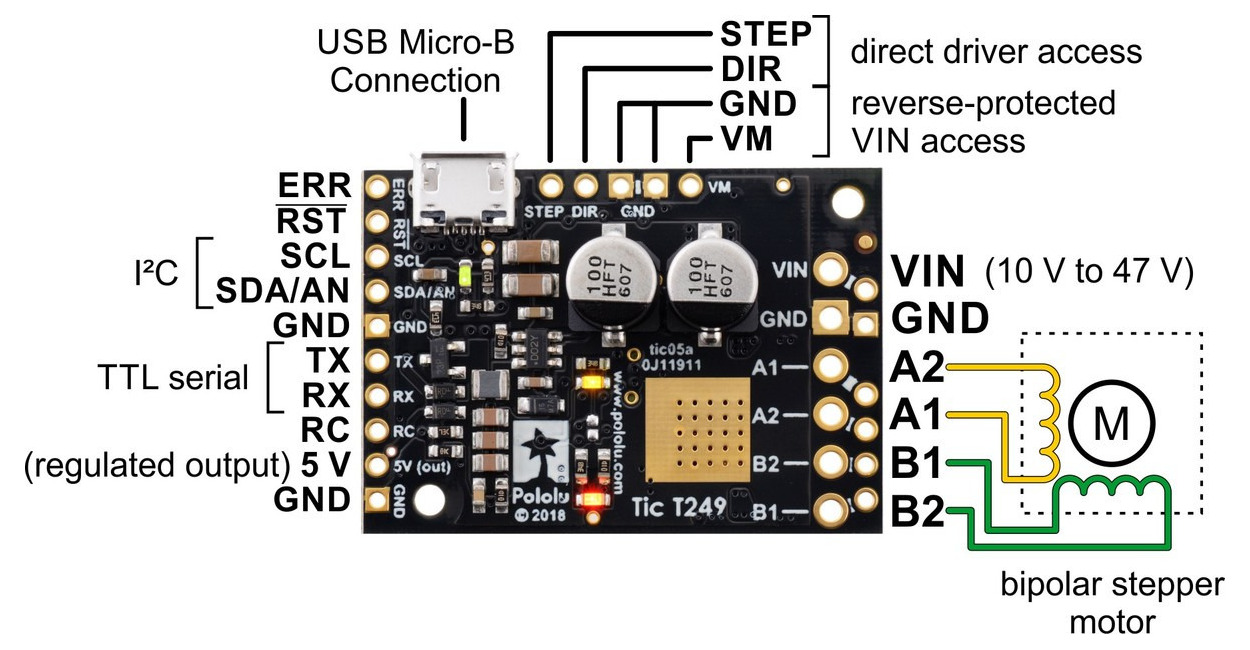
The figure shows the minimum controller connection
|
The manufacturer provides a comprehensiveuser guide. |
A5-volt controller is required for power supply (no external logic power supply is required), which must be led to a 5-volt pin.Themotor supply voltage from 10 V to 47 V is fed to the VIN pin.The systemcan control motors with a nominal voltage lower than the required 10 V. For this purpose, the maximum current consumption must be limited by means of a potentiometer so as not to exceed the permitted motor current. For example, for a motor with a resistance of 5 Ω per coil and a current consumption of 1 A, the nominal supply voltage is 5 V. When supplying 12 V, the current should be limited so that it does not exceed 1 A.
|
Attention! Connecting and disconnecting the motor while the controller is on can damage the system. |
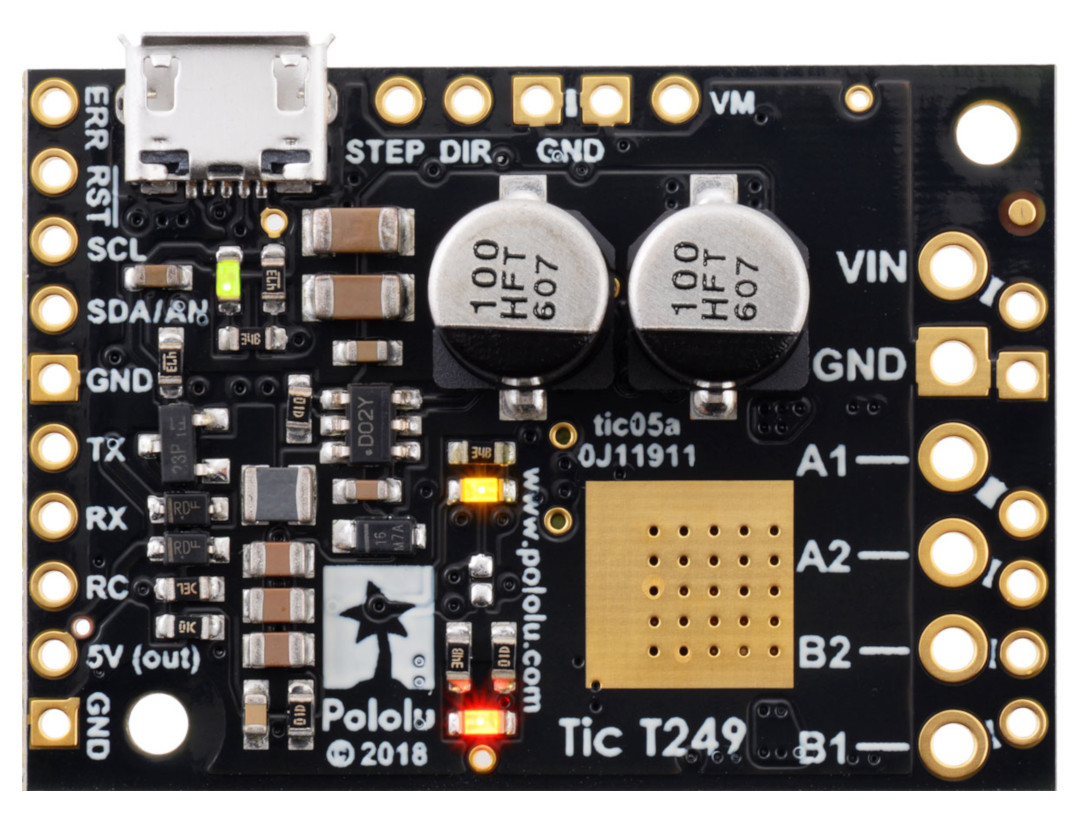
There are three LEDs on the board: green, red, yellow. Green indicates communication via USB. Red is associated with the ERR pin, if it lights up it indicates an error. Yellow indicates the status of the stepper motor and gives some information about errors, if any. For a detailed description see thedocumentation on the manufacturer's website.
The plate is designed to dissipate heat at a current consumption of approximately 1.8 A per coil. If the current is much higher, an external heat sink should be used,for which a thermally conductive adhesive can be used.
| We also offer an assembled version. |
Useful links |
| Voltage to | 10.0 V |
| Voltage from | 47.0 V |
| Current | 4.5 A |
| Channels | 1 |
| Niebezpieczne | Component |
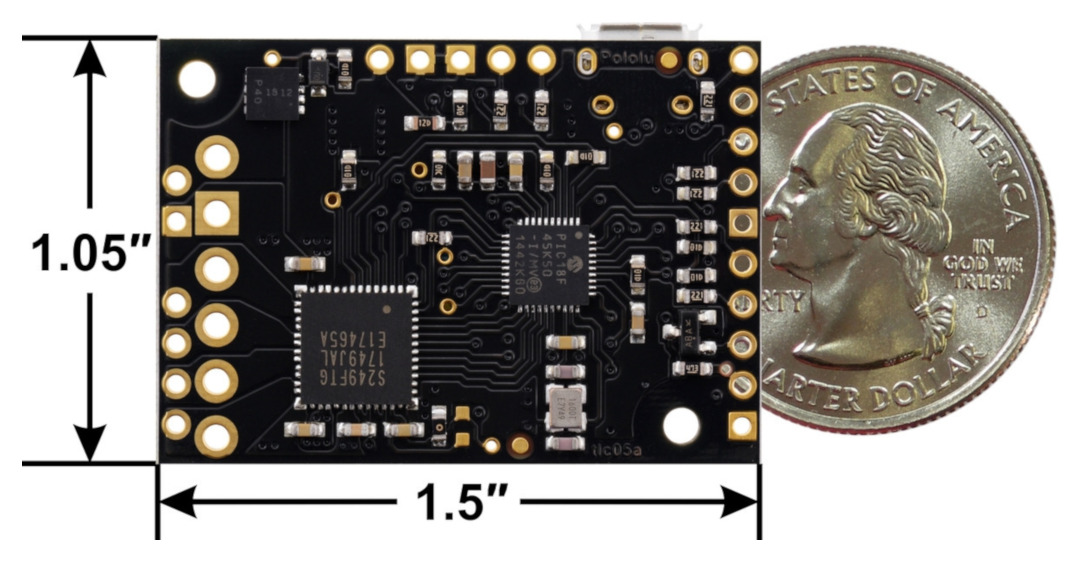
| Package width | 8.2 cm |
| Package height | 1.2 cm |
| Package depth | 7.7 cm |
| Package weight | 0.011 kg |
Be the first to ask a question about this product!

Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin



