







































































































































































































































































































































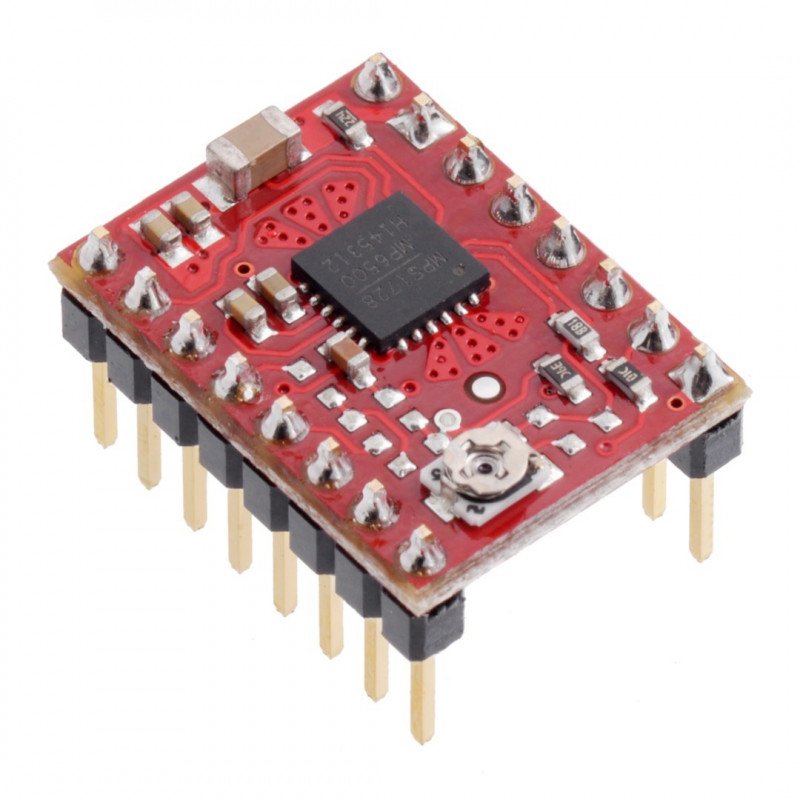







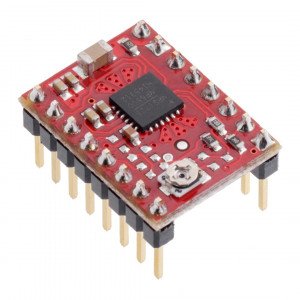
Stepper motor controller based on MP6500 system. Powered from 4.5 V to 35 V, with a maximum current consumption of 2.5 A per coil. Maximum resolution: 1/8th step. The module allows up to 1.8 A current flow without heatsink. The current is controlled by means of a potentiometer.The module is available with soldered goldpin connectors.
|
The module has goldpin connectors soldered in. We also offer a version withoutmounted connectors. |
The system allows to control the stepper motor with a device allowing to generate logical states, e.g. Arduino, STM32Discovoery, RaspberryPior anymicrocontroller. The Polol module is characterized by very simple operation. In order to turn the motor one step at a time, a high state (logical one) must be given to the STEP output, the next sequence of zeroes and ones will move the motor one step at a time, and so on. The direction is selected by entering the appropriate state on the DIR output (e.g. low state - clockwise rotation, high state - the opposite). The controller also has the ability to select theresolution ofthe motor.
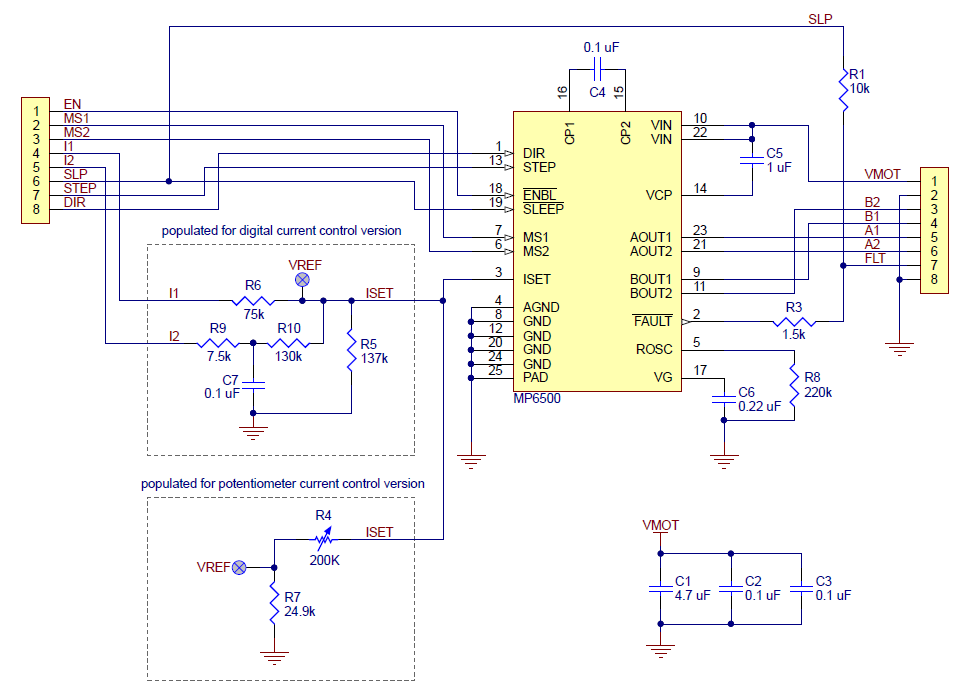
To control the bipolar stepper motor, connect the system as shown in the figure below. In case of controlling a unipolar motor, refer to themanual.If the nominal motor voltage is lower than the required power supply for the controller (4.5 V),set the current limitmanually using a potentiometer.

The figure shows the minimum connection of the controller. Place a resistor between the motor supply pin and ground at +/- 100 µF
Avoltage range of 2.5 V to 5 V is required to supply the logical part of the module, which must be led to the Sleep pin.Themotor supply voltage from 4.5 V to 35 V is fed to the VMOT pin.The systemcan control motors with a nominal voltage lower than the required 4.5 V. For this purpose, the maximum current consumption mustbe limitedso as not to exceed the permitted motor current. For example, for a motor with a resistance of 5 Ω per coil and a current consumption of 1 A, the nominal supply voltage is 5 V. When supplying 12 V, the current must be limited so that it does not exceed 1 A.
|
Attention! Connecting and disconnecting the motor while the controller is on can damage the system. |
The step size is selected using MS1,MS2inputs. The possible settings are shown in the table below. The MS1 and MS2 inputs have an internal pull-down resistor (500 kΩ).
| MS1 | MS2 | Resolution |
| low | low | Full step |
| high | low | 1/2 step |
| low | high | 1/4 step |
| high | high | 1/8th step |
One pulse given on the STEP pin causes one motor step in the direction selected by giving the appropriate logical state on the DIR pin. If the motor is to rotate in only one direction, the DIR pin can be left disconnected.
The system has two different inputs to control the power supply:Note that the controller pulls both of these pins through internal 500 kΩ lowering resistors. By default, the SLEEP state makes it impossible for the motor to operate, it must be given a high state (it can be connected directly to a 2.5 to 5 V logical power supply or it can be controlled by connecting to a digital MCU output). The default ENBL state is to enable the controller, it can be disconnected.
The FAULT output is disconnected when the F and H jumpers are switched off as a result of current, over-voltage, thermal shutdown, or low-voltage protection. It connects to the SLEEP pin with a 10 kΩ resistor, which works similarly to FAULT. When the SLEEP is in a high state, no FAULT connection is needed.
|
Attention! As a result of connecting the SLEEP and FAULT and a fault, the voltage on the SLEEP pin may drop below 2.1 V if it is not amplified enough. It is recommended to use a min resistor. 4.7 kΩ withthis lead or connect SLEEP directly to VCC. |
The system may be controlled by motors with a nominal voltage lower than the required 4.5 V. For this purposerestrictmaximum current consumption by means of a potentiometer so as not to exceed the permissible motor current. For example, for a motor with a resistance of 5 Ω per coil and a current consumption of 1 A, the nominal supply voltage is 5 V. When supplying 12 V, the current must be limited so that it does not exceed 1 A.
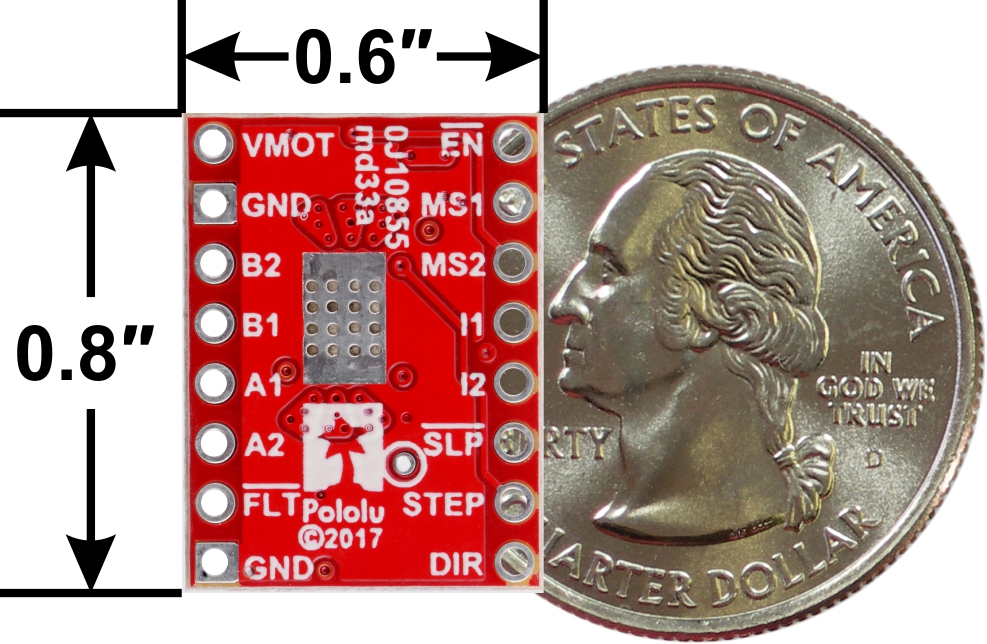
The MP6500 module allows for active current limitation with a potentiometer. One of the ways to introduce the limitation is to set the controller to full step mode and to measure the current flowing through one coil without giving a signal to the STEP input. The measured current is 70% of the set limit (both coils are always on and limited to 70% in full step mode). Another way is to measure the voltage at the VREF output (marked with a circle on the PCB) and calculate the current limit (measuring resistors are 0.05Ω). More details inMP6500 system documentation.
The plate is designed to dissipate heat at a current consumption of approximately 1.8 A per coil. If the current is much higher, an external heat sink should be used,forwhich you can use a thermally conductive adhesive.
The system contains the necessary passive components for proper operation ofthe controller.The connection diagram is shown in the drawings below.
Useful links |
| Voltage to | 4.5 V |
| Voltage from | 35.0 V |
| Current | 2 A |
| Channels | 1 |
| Niebezpieczne | Component |
| Package width | 8.5 cm |
| Package height | 1.1 cm |
| Package depth | 7 cm |
| Package weight | 0.001 kg |
Be the first to ask a question about this product!
Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin





