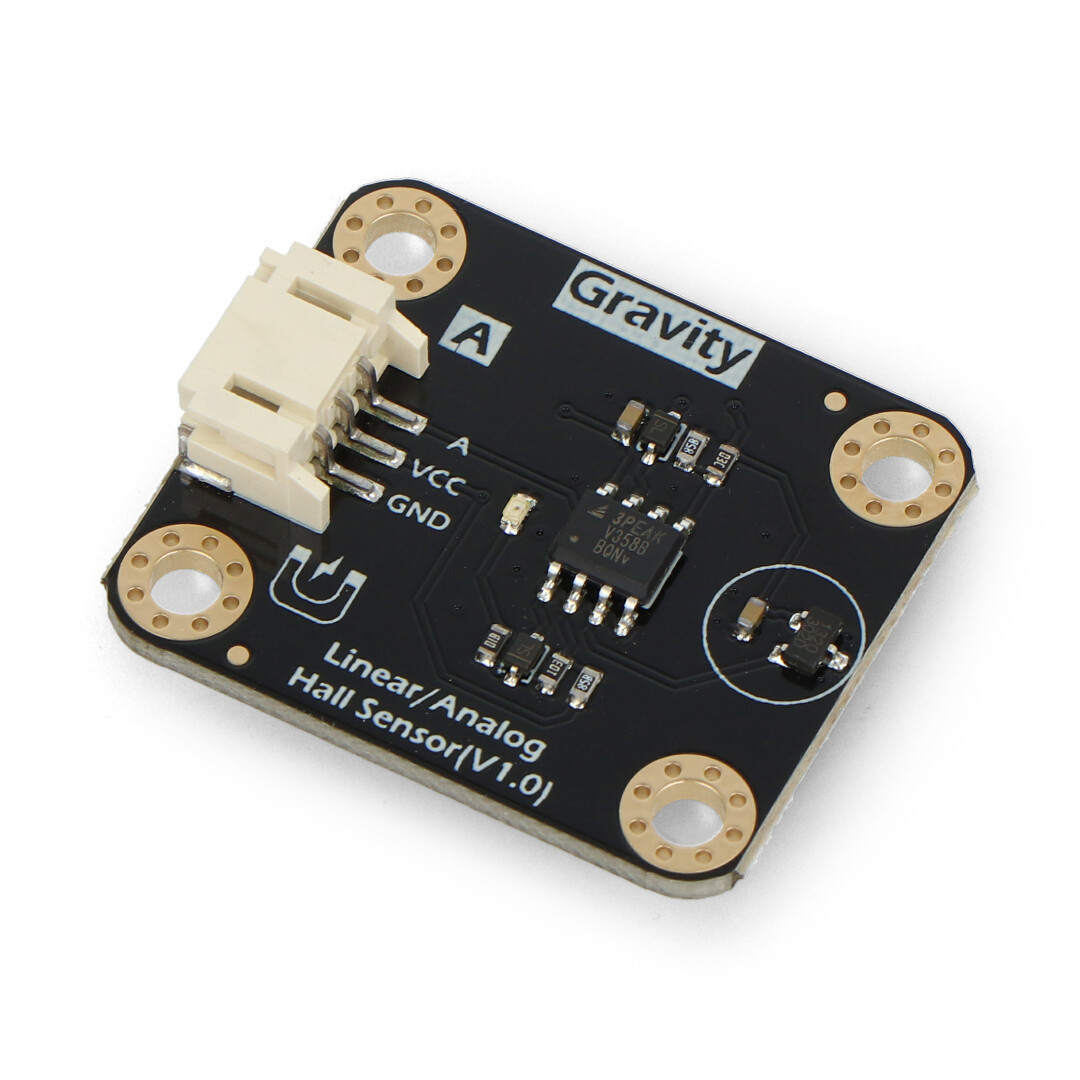
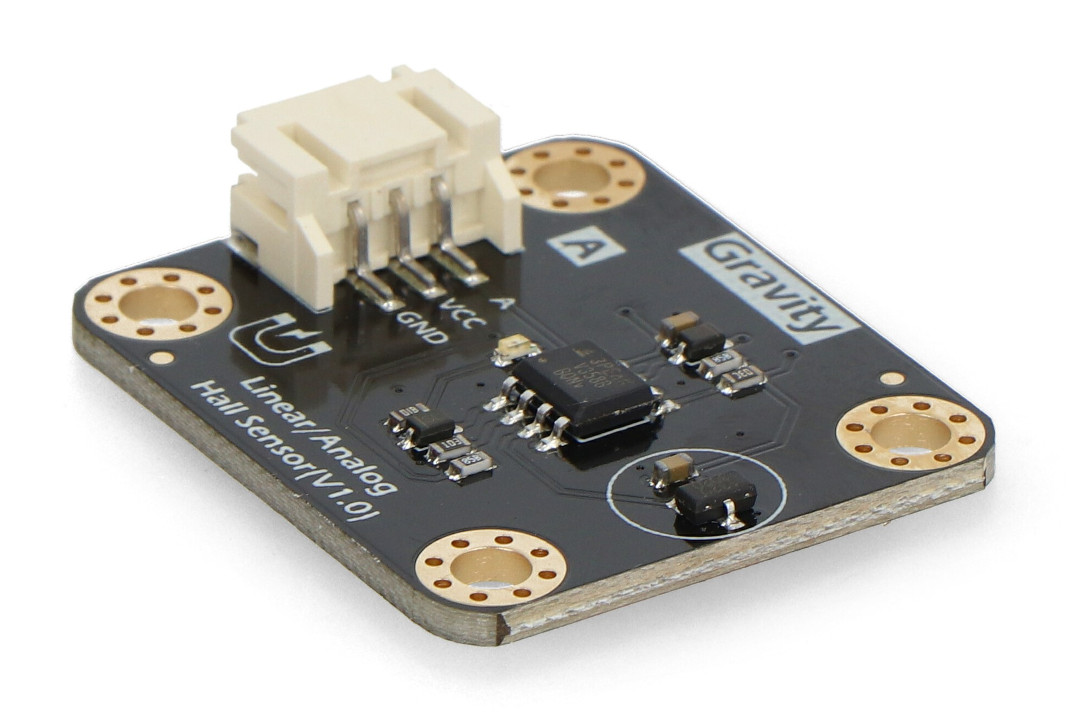
DFRobot Gravity module with Hall sensor designed to measure and monitor the intensity of the magnetic field . It is equipped with 3 analog pins and an LED indicator that signals the detected magnetic field. It is powered by a voltage from 3.3 V to 5 V, its supply current is from 4.2 mA to 8 mA. It is characterized by a low level of noise, which allows only minimal interference. It integrates with controllers such as Arduino, Micro:bit and UNIHAKER , thanks to which it will work, for example, in detecting position and speed in robotics or security systems.
Arduino compatible product
The manufacturer has prepared a detailed user guide that includes a description of projects using the sensor and sample program code.
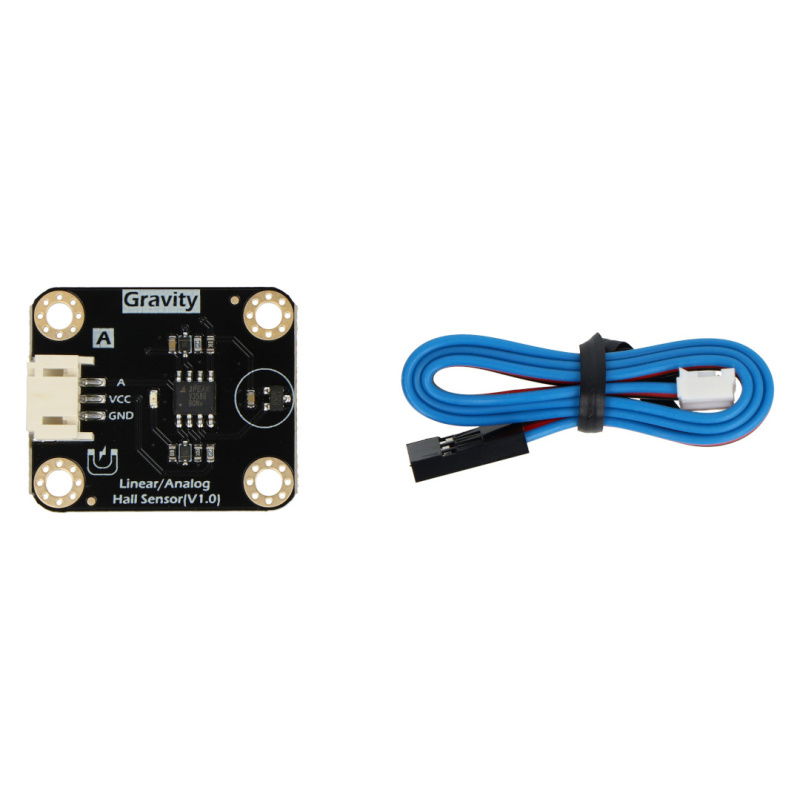
DFRobot Gravity - linear / analog Hall magnetic field sensor - DFR1132.
DFRobot Gravity module with Hall sensor.
The sensor works with a microcontroller equipped with analog inputs ( Arduino , Micro:bit, UNIHIKER). To start work, connect:
Once connected, the sensor will generate an analog signal proportional to the strength of the detected magnetic field, which allows for accurate monitoring of field changes and processing of results in electronic designs.
 Compatible with Arduino, Micro:bit and UNIHAKER.
Compatible with Arduino, Micro:bit and UNIHAKER.
The advanced DFRobot Gravity DFR1132 board has core circuits that convert magnetic induction force directly into output voltage. High accuracy allows the sensor to be used in many solutions that require precise magnetic field detection . These can be projects related to industrial control, scientific research, security systems and various projects with electronic devices. The sensor responds to magnetic fields when:

Kit contents.
| Voltage to | 3.3 V |
| Voltage from | 5.0 V |
| Niebezpieczne | Component |
| Package width | 5.7 cm |
| Package height | 6.2 cm |
| Package depth | 2.7 cm |
| Package weight | 0.012 kg |
Be the first to ask a question about this product!
Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: China
Manufacturer Contact Details: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]