






















































































































































































































- Sale
- SPECIAL OFFERS






An intelligent image sensor with a built-in processor, thanks to which the robot can find objects. Pixy has support for various devices, e.g. Arduino, Raspberry Pi or BeagleBone. The software is in line with the OpenSource ideology, the camera has many interfaces including: UART, SPI, I2C and USB.
An intelligent image sensor that allows the robot to find objects. Pixy has support for various devices, such as Arduino , Raspberry Pi or BeagleBone . The software and hardware are fully OpenSource compliant, so they can be freely modified.

Pixy2 is smaller, faster and more efficient than its predecessor. Like its predecessor, it can learn to detect objects , and it also has new algorithms that detect and track lines. These algorithms can also detect intersections and "road signs" that tell the robot what to do, e.g. turn left, slow down, etc. Pixy2 has a speed of 60 fps.

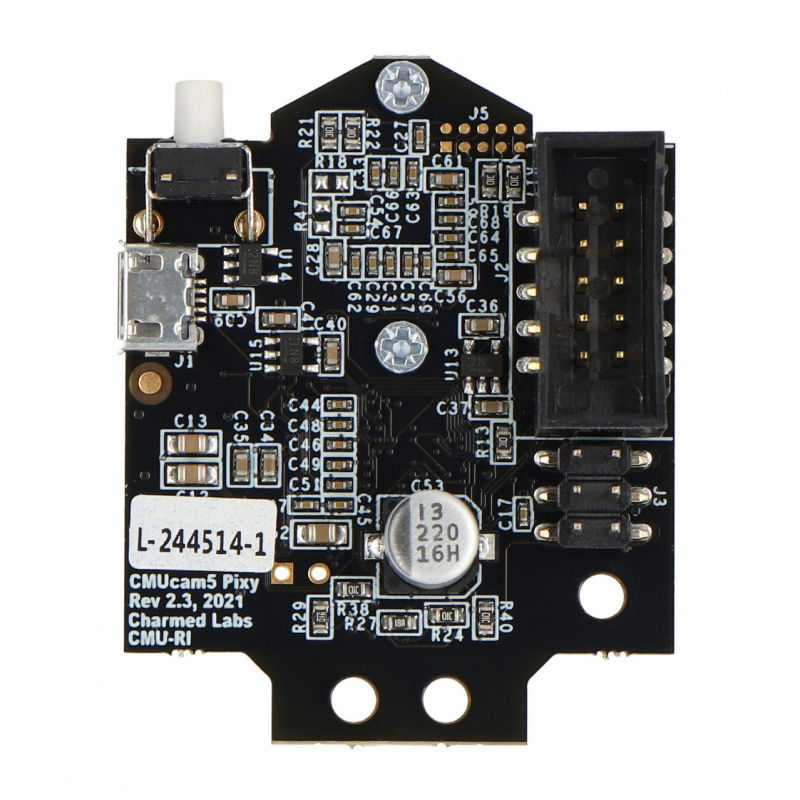
PixyCam camera - front view (left) and bottom view (right).
To run the camera in Windows, simply:
The device can also be connected to any microcontroller (including Arduino and Raspberry Pi ) via available communication interfaces, e.g. UART, I2C, SPI. A detailed description can be found in the user guide . |
We offer a unique component - this is the PixyCam version 2 CMUcam5 camera - the device works as an intelligent image sensor. The manufacturer is the popular SparkFun brand, so you can be sure that the product is high-class equipment.
The camera is capable of recording and analyzing images at 60 frames per second. A specially designed processor is responsible for the analysis, so the logic circuit of the board is not additionally burdened with such a task.
Thanks to the manufacturer, which focuses on development and a friendly approach to the customer, the purchased equipment and software can be freely modified - there is a so-called OpenSource license for everything. The camera is perfectly adapted to work with such minicomputers as Arduino and Raspberry Pi.
In our offer you will find many more smart cameras, distance sensors and other similar modules ready for installation in the target equipment. The entire Botland assortment is products from the field of electronics, robotics and automation.
Useful links |
| Interface | SPI / I2C / UART / USB |
| Resolution | 1,2 MPx |
| Camera - matrix | MT9M114 |
| Camera - type | module |
| Package width | 7.657 cm |
| Package height | 3.714 cm |
| Package depth | 6.894 cm |
| Package weight | 0.068 kg |
Be the first to ask a question about this product!
Country of Origin: United States
Manufacturer Contact Details: SparkFun Electronics 6333 Dry Creek Pkwy, Niwot, CO 80503, Stany Zjednoczone
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin