







































































































































































































































































































































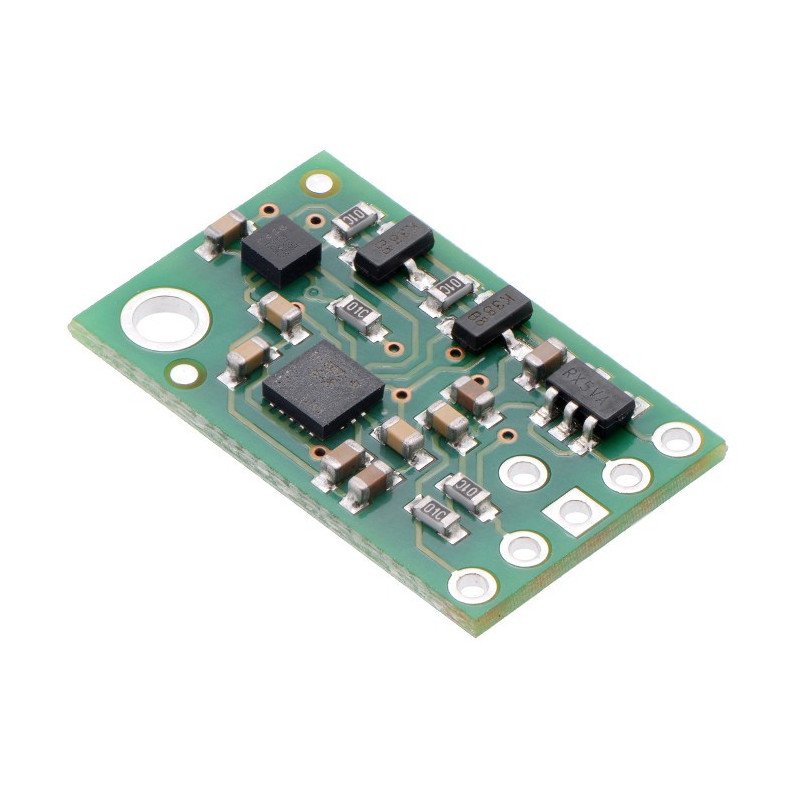






The sensor allows to measure 9 sizes: acceleration X, Y, Z magnetic field X, Y, Z and angular velocity X, Y, Z. It is a combination of 3-axis accelerometer and gyroscope LSM6DS33, and magnetometer LIS3MDL. Communicates via the I2C bus.
Module, using a 3-axis accelerometer, a magnetometer and a gyroscope, allows to measure nine independent values: acceleration, magnetic field and angular velocity - each in three axes. Knowledge of these values allows to find the object in 3D space. The popular I2C bus (TWI) is for communication with the central unit.

The kit includesthe goldpin connectorsfor self-assembly.
The module has a built-in voltage regulator and all necessary passive components. The leads are popular goldpin connectors for connecting the sensor viawiresor for directly attaching to breadboard.
 This kit includes the goldpin connectors for self-assembly.
This kit includes the goldpin connectors for self-assembly.
In relation to the previous version, the MinImu-9 v5 has a new 3-axis MEMS sensors from the company ST - gyroscope and accelerometer LSM6DS33 (documentation) and magnetometer LIS3MDL (documentation). These sensors have higher precision and provides improved stability of measurement from its predecessors. New magnetometer allows to measure in a wider range - up to 16 GS. The distribution of leads is fully compatible with v3 but changed were the sample programs and libraries for Arduino.
|
The product is compatible with Arduino A library for user of moduleArduino: |
The sensor has five leads for mounting goldpin connectors - 2.54 mm pitch (included in the kit for self soldering).

| PIN | Description |
|---|---|
| SCL | Clock line of the I2C bus. High, equal state is equal to the voltage VIN. Low GND. |
| SDA | The data line of the I2C bus. High, equal state is equal to the voltage VIN. Low GND. |
| GND | The potential of the mass of the system. |
| VIN | Supply voltage from 2.5 V to 5.5 V. |
| VDD | In the case where the voltage is higher than 3.3 V, the lead can be the output voltage 3.3 V with output current up to 150mA. When the supply voltage is in the range of 2.5 V - 3.3 V, you should connect it to VDD lead |
| SA0 |
Input to change I2C addressing in accordance with the table below. By default, in the high state through a resistor of 10kΩ.Pin works with a voltage of 3.3 V, connecting 5 V can permanently damage the chip. |
Accelerometer, magnetometer and gyroscope in a module MinImu-9, have 7-bit adresses. Mounted respectively on:
| Sensor |
Address by default |
Address SA0 in low state |
|---|---|---|
|
LSM6DS33 the accelerometer and gyroscope |
1101011b | 1101010b |
|
LIS3MD magnetometer |
0011110b | 0011100b |
The system is insmall size, its contour fits in a rectangle of a size: 20 x 13 mm. For mounting, use the hole with an inner diameter of 2.2 mm.

All of the information required for start and operation of the sensor, is given inthe documentation. Below, we present selected important tips:
Useful links |
| Niebezpieczne | Component |
| Package width | 7.5 cm |
| Package height | 0.6 cm |
| Package depth | 8.5 cm |
| Package weight | 0.002 kg |
Be the first to ask a question about this product!

Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




