






































































































































































































































































































































Lesson 5: Ultrasonic distance sensor and relay
Objective
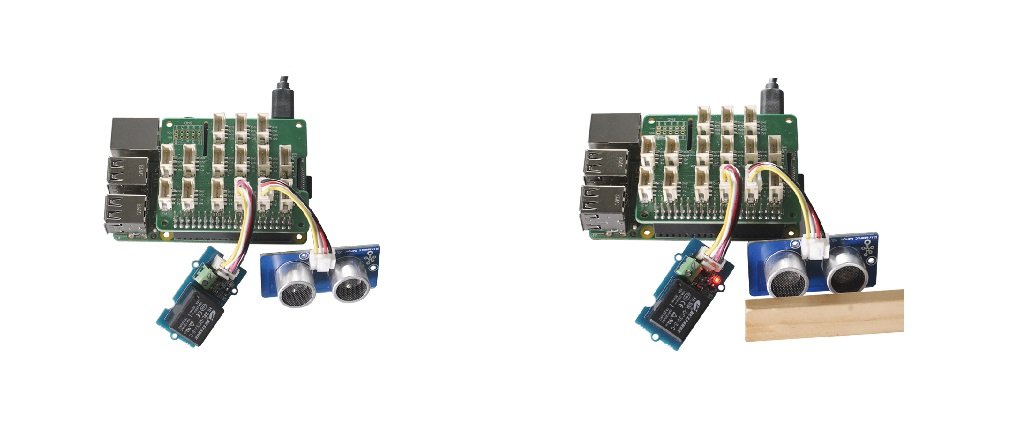
In this lesson we will use the Grove - ultrasonic distance sensor to measure the distance when someone comes close, the light on the Grove - relay should switch on.
Hardware requirement
Prepare:
- microUSB cable
- Raspberry Pi
- Computer
Included in the set
- Grove Base Hat
- Grove wire
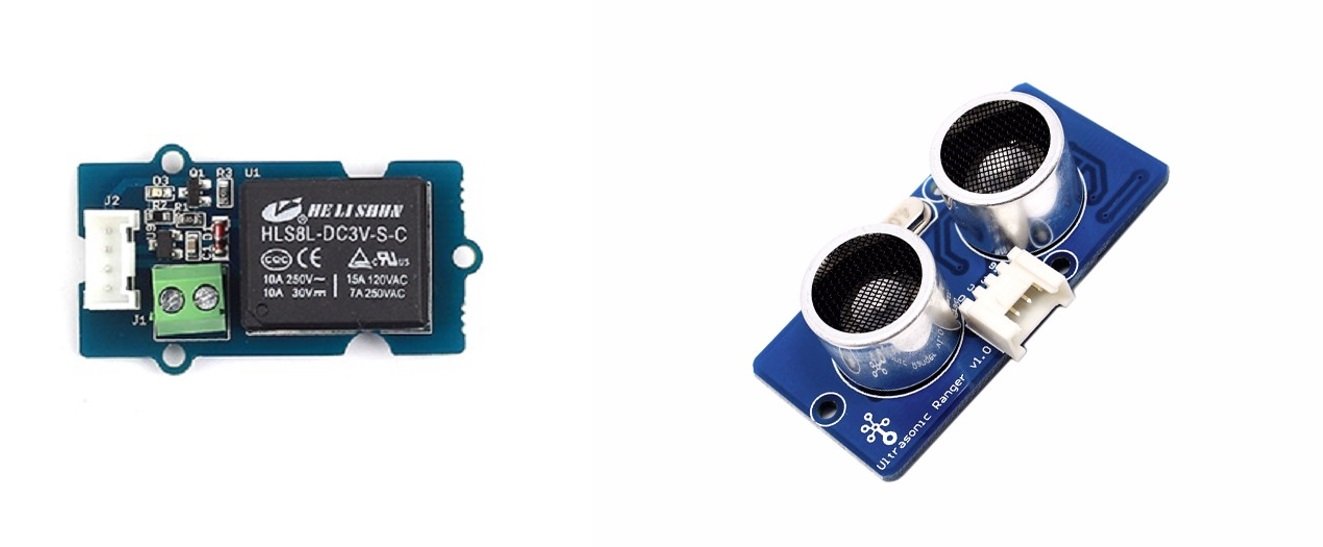
- Grove - Ultrasonic distance sensor
- Grove - Relay
Connecting equipment
Step 1 Connect Grove - Ultrasonic distance sensor to port D5, Grove - Relay to port D16 on Base Hat.
Step 2 Connect Base Hat to Raspberry Pi
Step 3 Connect the Raspberry Pi to the power source using the microUSB cable.

Programming
|
Note Make sure you clone the python.py repository library on your Raspberry Pi. |
Step 1: Enter the following commands to create a Python file
cd grove.py nano lesson_5.py
Step 2: Copy the following code
#!/usr/bin/env python
import time
from grove.grove_relay import GroveRelay
from grove.grove_ultrasonic_ranger import GroveUltrasonicRanger
def main():
# Grove - Ultrasonic Ranger connected to port D5
sensor = GroveUltrasonicRanger(5)
# Grove - Relay connected to port D16
relay = GroveRelay(16)
while True:
distance = sensor.get_distance()
print('{} cm'.format(distance))
if distance < 20:
relay.on()
print('relay on')
time.sleep(1)
relay.off()
print('relay off')
continue
time.sleep(1)
if __name__ === '__main__':
main()
Step 3:Uruchomprogram
sudo chmod +x lesson_5.py sudo ./lesson_5.py
If everything goes well, a change in light intensity should cause a change in the angle of rotation of the servo.
pi@raspberrypi:~/grove.py $ sudo ./lesson_5.py 253.722585481 cm 253.739028141 cm 252.896341784 cm 1.20442489098 cm relay on relay off 4.51762100746 cm relay on relay off 253.985668051 cm ^CTraceback (most recent call last): File "./lesson_5.py", line 34, inmain() File "./lesson_5.py", line 31, in main time.sleep(1) KeyboardInterrupt pi@raspberrypi:~/grove.py $
Now compare your results from the fourth and fifth lessons. Can you list the advantages and disadvantages of Grove - a mini PIR motion detector and Grove ultrasonic distance sensor?
Table of contents
|