












































































































































































































































































































































The RPLiDAR A1M8-R6 is a 2Dlaser scannerfrom Slamtec. The device can perform360°scans at adistance of up to 12 m. The resulting 2D point cloud can be used for mapping, localization and modeling of individual objects or surroundings. The operating frequency of the RPLiDAR A1M8-R6 is 5.5 Hz sampling 360 points per revolution. The product is a laser measurement system based on triangulation. It can be used in locations where there is no direct sunlight.

RPLiDAR Laser Scanner A1M8-R6 360 degree - 12 m.

RPLiDAR A1M8-R6 with microUSB adapter.
The RPLiDAR A1M8-R6 rotates clockwise while performing a 360-degree, omni-directional laser scan of its surroundings. It then generates a contour map of the object or its surroundings using hardware support.

RPLiDAR A1M8 2D laserscanner.

Electronic circuitry responsible for scanner operation.
The RPLiDAR A1M8-R6 3D laser scanner uses a UART serial interface for communication. Below is a description of each pinout:
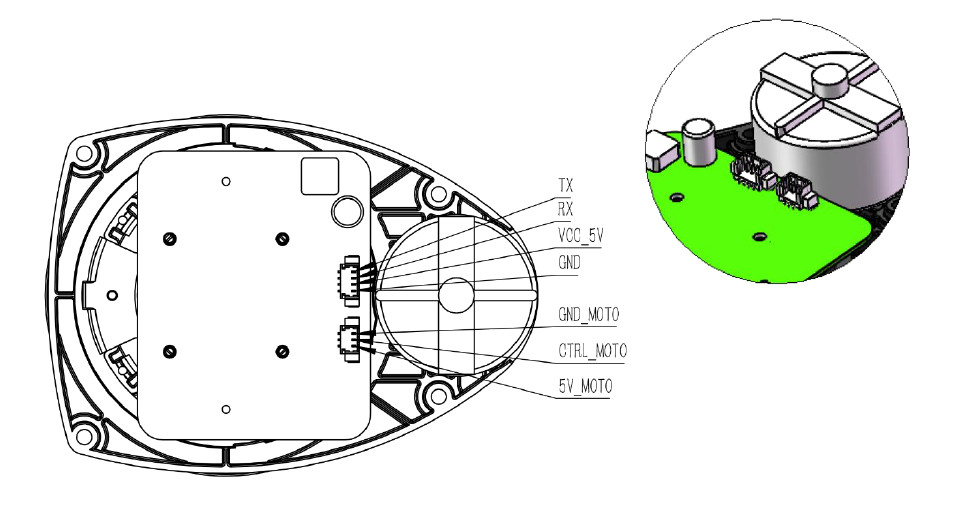
Pinouts of the RPLiDAR A1M8-R6 3D laser scanner.
| Niebezpieczne | Component |
| Package width | 12.5 cm |
| Package height | 9.5 cm |
| Package depth | 8 cm |
| Package weight | 0.253 kg |
Be the first to ask a question about this product!

Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: China
Manufacturer Contact Details: Seeed Technology Co.,Ltd. Tower B 1/F, Shanshui Building, NanshanYungu Innovation Industry Park, Liuxian Ave. No. 1183 CN 518055 Shenzhen [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin


