



















































































































































































































































































































































6-channel servo controller with support for digital and analog signals. The user has at his or her disposal, the control of the servos through: the PC app (USB), serial interface and a simple script language.
|
The product is compatible with Arduino The manufacturer providesa library in GitHubfor Arduino users. |
The film made by Pololu, introduces the possibilities of the product.
The Maestro series are the universal controllers of servos which are also able to interpret the digital and analogsignals. Thanks to the different control options, a wide range of supply voltages, as well as the simple usage, Maestro has proven itself in many projects that use servos. Depending on the number of used servos, the user can choose a suitable option. Available are 6,12,18and24-channel modules.
|
|
|
|
|
|
| Number of channels: | 6 | 12 | 18 | 24 |
| The number ofanalog inputs: | 6 | 12 | 12 | 12 |
| The number ofdigital inputs: | 0 | 0 | 6 | 12 |
| Width[mm]: | 21,6 | 27,9 | 27,9 | 27,9 |
| Length[mm]: | 30,5 | 36,1 | 45,7 | 58,4 |
| Weight[g]: | 3,0 | 4,2 | 4,9 | 6,0 |
| Pulse frequency: | 33-100 Hz | 1-333 Hz | 1-333 Hz | 1-333 Hz |
| The range of pulses: | 64-3280 μs | 64-4080 μs | 64-4080 μs | 64-4080 μs |
| The size of the script: | 1 KB | 8 KB | 8 KB | 8 KB |

The user can adjust the controller to the requirements of his/her project,choosing one of three different communication interfaces:
USB computer app -device connects to the computer usingthe mini USB cable. For the operation of the controller is an intuitive program that allows, i.a.:
In order to use the option of control via USB, just download the program to your disk (version:Windows,Linux), launch it and connect controller to any USB port on the computer.
Serial interface (UART) - the interface allows you to connect the Maestro with the central unit which can be any microcontroller or commissioning set, for example,Arduino,STM32DiscoveryorRasbperry Pi. Handling of the servos is done by sending special charactercommands. Examples with description can be found inthe manual.
The script- by selecting this option, the user can create and store in memory of the Maestro, the selected sequence of events, for example, the dependence of the position of servo from the voltage level on the analog input, to which connected is any analog sensor, e.g.,gyroscope,accelerometerorrangefinder. Description of scripting language together with examples of its usage, you canfind inthe instructions.
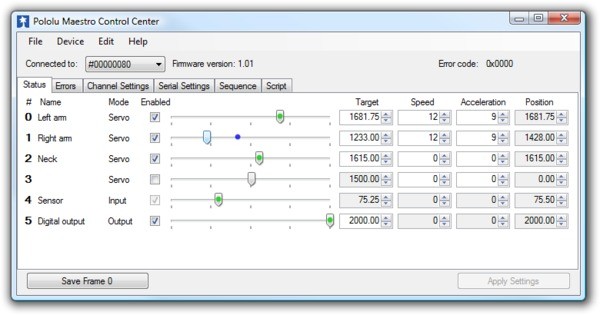
The computer app allows you to control the position and speed ofservos, to read and write status of I/O viaUSB cable.
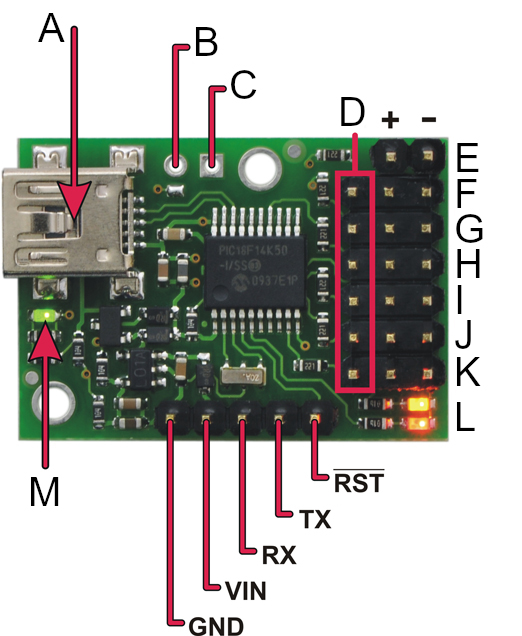
Leads are the popular goldpin strips (2.54 mm pitch) suited for standard connectors of servosandconnecting cables.
Useful links |
| Voltage to | 5.0 V |
| Voltage from | 16.0 V |
| Current | sources |
| Channels | 6 |
| Niebezpieczne | Component |
| Package width | 8 cm |
| Package height | 1 cm |
| Package depth | 8.5 cm |
| Package weight | 0.006 kg |
Be the first to ask a question about this product!

Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin










 Micro
Micro








