























































































































































































































































































































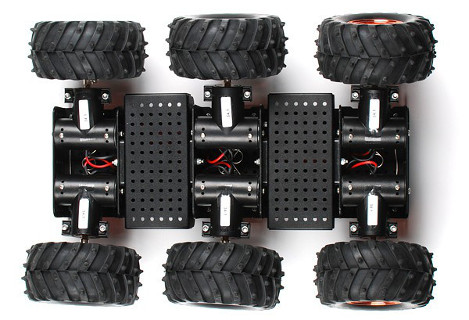
Strong and durable, 6-wheeled chassis for building a robot with a "Super Twist" suspension. The set also includes 6 motors with gear 34:1 with torque 4 kg*cm and aluminum frame with mounting holes.
Strong and durable, 6-wheeled chassis for building a robot with a "Super Twist" suspension. The set also includes 6 motors with gear 34:1 with metal gearbox 34:1 and torque 4 kg*cm and aluminum frame with mounting holes. The layout is designed for self-assembly according to the instructions.

Each of the 6 motors has a separate suspension, which allows you to keep all wheels in contact with the surface even over rough terrain. Transmission are connected to each other with a durable aluminum frame 2 mm thick. The case has mounting holes 4 mm in diameter, for mounting additional elements.
The drive is differential. This means that in order to let the robot turn, you should reduce the motor speed on one side, or increase on the other. The motors are by default connected together on one side, however, you can disable them to manage each separately. To control the system you need a module with the motorscontroller, allowing to obtain up to 20A of temporarycurrent. In our offer there are drivers High Power, providing control over applied motors. As the main module, you can useArduinoorRaspberry Pi minicomputer.

Detailed data available onthe scheme.
Useful links |
| Chassis - wheels | 6 |
| Chassis - type | wheel |
| Chassis + drive | yes |
| Chassis + driver: | no |
| Package width | 0.89 cm |
| Package height | 19 cm |
| Package depth | 30 cm |
| Package weight | 3.85 kg |
Be the first to ask a question about this product!











