0,8mm Micro Swiss nozzle for Elegoo Neptune 4 Plus/4Max 3D printers - 1,75 mm filament... Index: MIS-27192 €14.90 New
Standing rack installation cabinet - 19'' 22U 600x1200mm - black - Lanberg FF01-6022-23B Index: IMP-27399 €413.50 New
0,6mm Micro Swiss nozzle for Elegoo Neptune 4 Plus/4 Max 3D printers - 1,75 mm filament... Index: MIS-27191 €14.90 New
HPCB Motor with 75:1 Gear - doublesided shaft - Pololu 3074 Index: PLL-05094 €25.00 €21.25 Reduced price Sale
DFRobot Gravity - digital button Tact Switch - yellow Index: DFR-11279 €2.00 €1.80 Reduced price Sale
Filament Polymaker Panchroma PLA 1,75mm, 1kg - Peanut Index: PLM-22659 €20.50 €18.45 Reduced price Sale
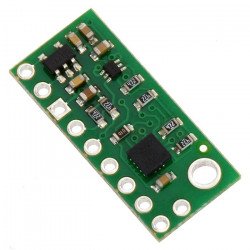
SparkFun Tristimulus Color Sensor - OPT4048DTSR - Qwiic - SparkFun SEN-22638 Index: SPF-23976 €18.50 €16.65 Reduced price Sale