







































































































































































































































































































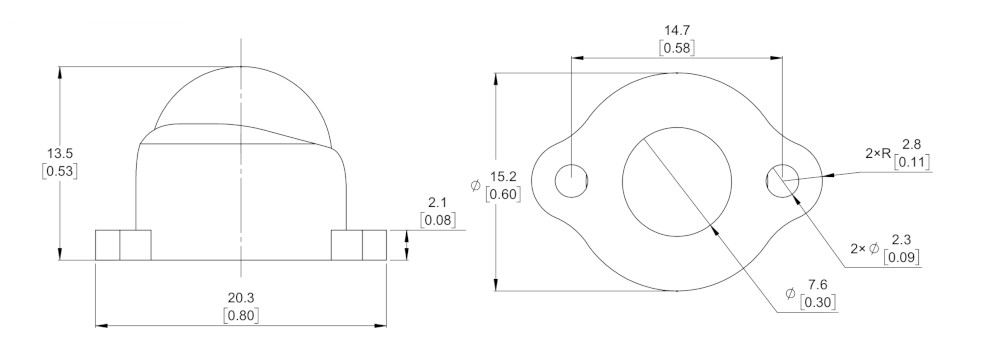
Metal ball in the bowl with a diameter of 1/2 inches, it is ideal to use to support the front of the two-wheeled robot.
Metal ball in the bowl with a diameter of 1/2 inches, it is ideal to use to support the front of the two-wheeled robot.

Useful links |
| Package width | 8 cm |
| Package height | 2 cm |
| Package depth | 10 cm |
| Package weight | 0.012 kg |
Be the first to ask a question about this product!




