












































































































































































































































































































- EOL

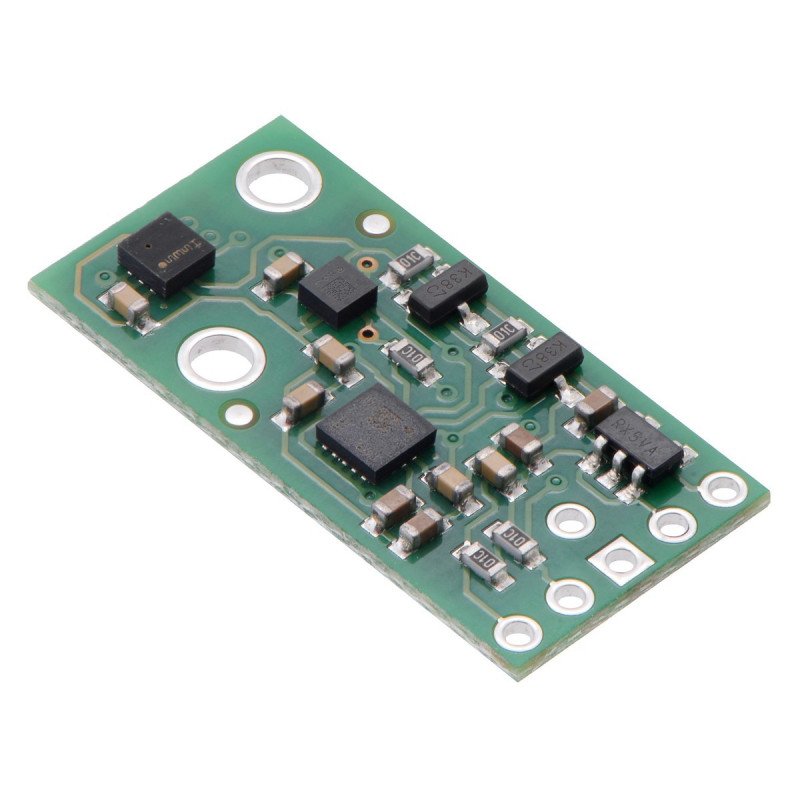






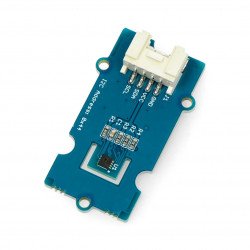
Sensor for measuring acceleration, magnetic field, angular speed and altitude. It is a combination of 3-axis accelerometer and gyroscope LSM6DS33, LIS3MDL magnetometer and barometer LPS25H. Communicates via the I2C bus.
|
Attention! The product has been discontinued. Check other products in category. |
Module AltIMU-10 v5 is the 3-axis sensors: accelerometer, gyroscope LSM6DS33, magnetometer LIS3MDL, andLPS25H barometer. Using these sensors, it is possible to create a complete system AHRS (attitude and heading reference system), i.e. to determine the position of the object in three-dimensional space. Data from the barometer can be easily converted to the height, thanks to gyroscope, you can track the rotations of the object, and accelerometer, along with magnetometer offset the drift of the gyroscope and determine the irrespective reference point.
The kit includesconnectors goldpin raster of 2.54mm for self-soldering.
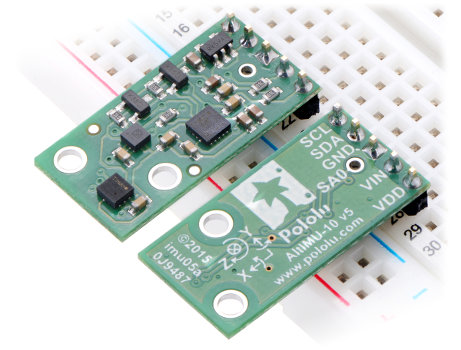
The module has a voltage regulator and all necessary passive components. The leads are popular goldpin connectors for connecting the sensor viawiresor to connect directly to breadboard.
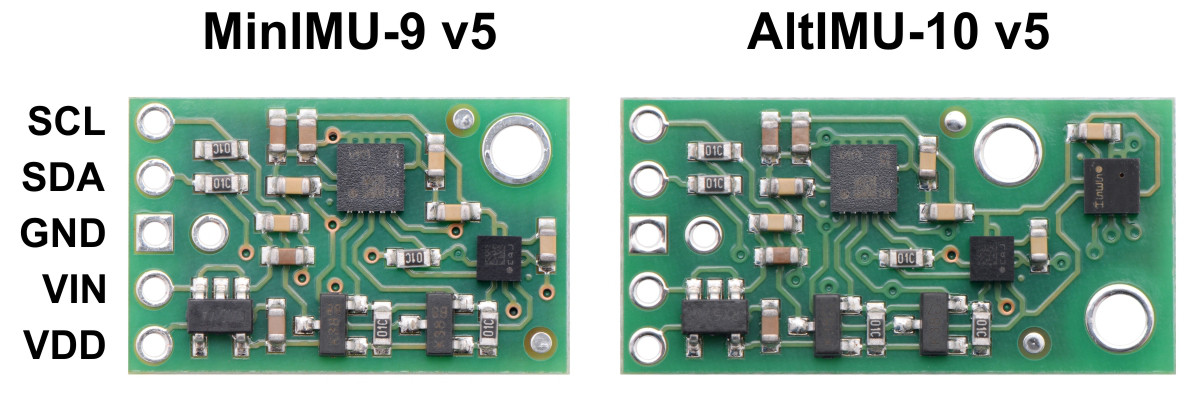
Compared tothe board MinImu v5 that has no height sensor.
In relation to the previous version, AltIMU-10 v5 has a new 3-axis MEMS sensors from the company ST - gyroscope and accelerometer LSM6DS33 (documentation), and magnetometer LIS3MDL (documentation). These sensors have higher precision and more improved stability of measurement than its predecessors. New magnetometer allows to measure in a wider range - up to 16 gauss. The distribution of leads is fully compatible with the version v4, while changed were sample programs and libraries for Arduino.
AltIMU-10 v5 is pin-compatible withthe module MinIMU-9 v5. It has the same functions with the expansion with digital barometer that can be used as a height sensor. Properly written code for the MinIMU-9 v5 will work with the system AltIMU-10 v5.
|
The product is compatible with Arduino A library for user of the moduleArduino: |
.
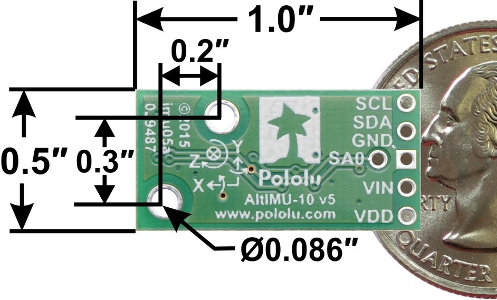
The sensor has five leads for mounting goldpin connectors - 2.54 mm pitch (included).

| PIN | Description |
|---|---|
| SCL | Clock line of the I2C bus. High state is equal to the voltage VIN. Low GND. |
| Traffic | The data line of the I2C bus. High state is equal to the voltage VIN. Low GND. |
| GND | The potential of mass of the system. |
| VIN | Supply voltage from 2.5 V to 5.5 V |
| VDD | In the case where the voltage is higher than 3.3 V, the lead can be the output voltage of 3.3 V with current efficiency up to 150 mA. When the supply voltage is in the range of 2.5 V - 3.3 V, you should connect it to the VDD lead. |
| SA0 |
Input to change I2C addresses in accordance with the table below. Pin works with a voltage of 3.3 V,connecting5 V can permanently damage the chip. |
Accelerometer, magnetometer, gyroscope and barometer, in a module, have the 7-bit addresses. Installed are respectively:
| Sensor |
Address by default |
Address SA0 in low state |
|---|---|---|
|
LSM6DS33 accelerometer and gyroscope |
1101011b | 1101010b |
|
LIS3MDL magnetometer |
0011110b | 0011100b |
|
LPS25H barometer |
1011101b | 1011100b |
The bus operates properly with a clock frequency up to 400 MHz (fast mode).
All the necessary information about the connection and the maintenance of the sensors of the module AltIMU-10 are in the documentation of theindividual sensors. Below are several the most important facts:
| Package width | 7.5 cm |
| Package height | 0.5 cm |
| Package depth | 8.5 cm |
| Package weight | 0.003 kg |
Be the first to ask a question about this product!











