















































































































































































































































































































































A set of two magnetic , square-tube encoders for metal micro motors. The encoder uses a magnetic disk and a Hall effect to obtain 12 pulses per revolution. The sensor is equipped with an angle connector. It works with a voltage from 2.7 V to 18 V.
A set of two magnetic,square-tubeencoders formetal micromotors.The encoder uses a magnetic disk and a Hall effect to obtain 12 pulsesper revolution. The sensor isequipped with an angular connector and operates at voltages from 2.7 V to 18 V.
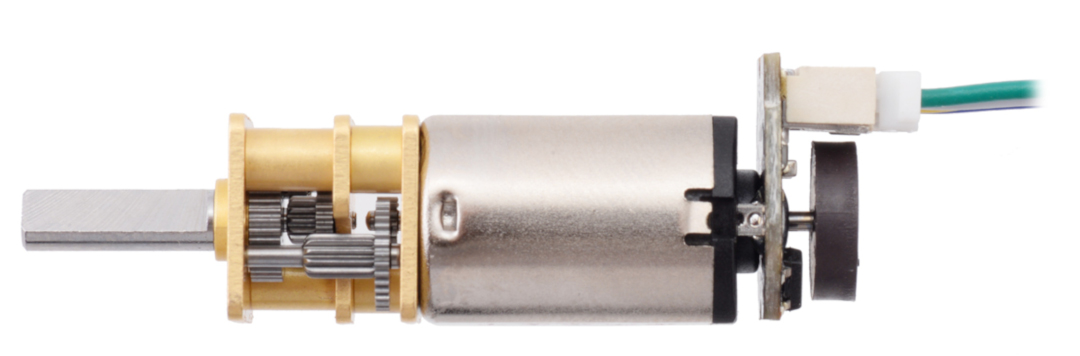
The encoder is mounted on the motor.
|
The sensors work only withmicro Pololmotorsequippedwith a double-sided, extended shaft. |
The principle of operation of the encoders.
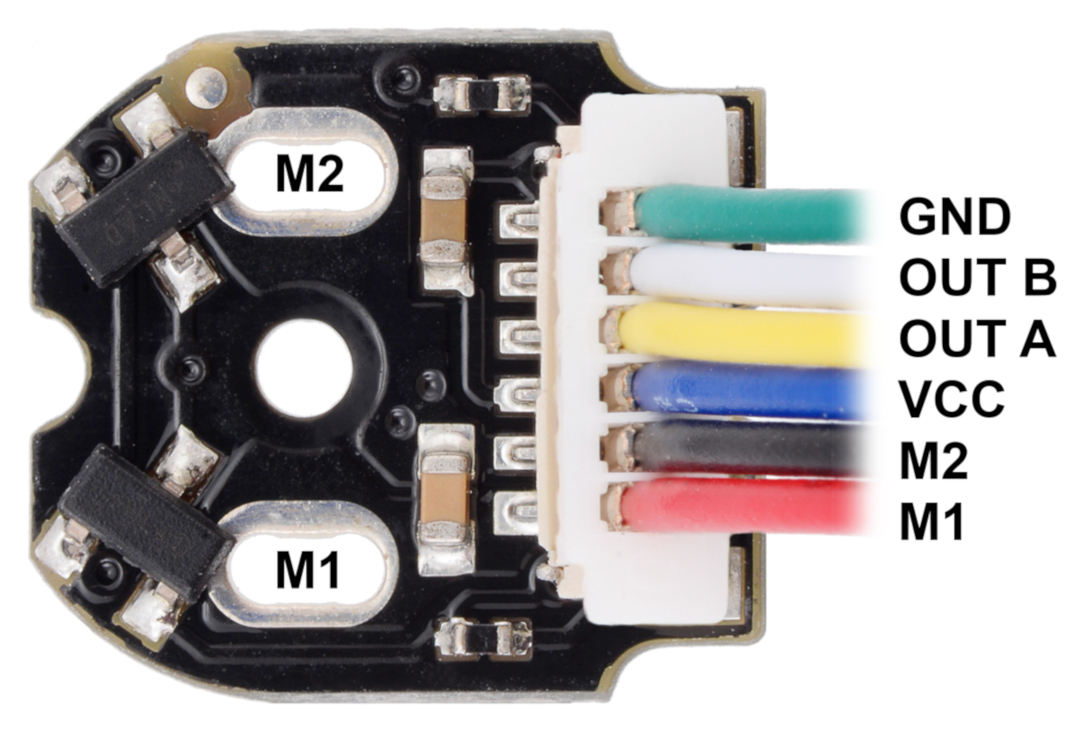
The board is equipped with M1 and M2 connectors to solder the motor contacts and a 6-pin socket adapted to JST SH connectorwith a1 mmgrid.M1 and M2pins are used to power the motor, the other four pins are used to power the sensor and access the quadrature outputs. TheVCC and GNDpins are used to power the sensor, whileOUT A and OUT Bare digital signals, supplied with low voltage (0 V) or pulled to VCC by a10 kΩresistor,dependingon the magnetic field. The comparators have a built-in hysteresis which prevents false signals when the motor stops near the transition point.
| Pin | Description |
|---|---|
| GND | Sensor weight. |
| OUT B | Square B output, digital signal. |
| OUT A | Square A output, digital signal. |
| VCC | Sensor power supply from 2.7 V to 18 V. |
| M1 | Engine power. |
| M2 | Engine power. |
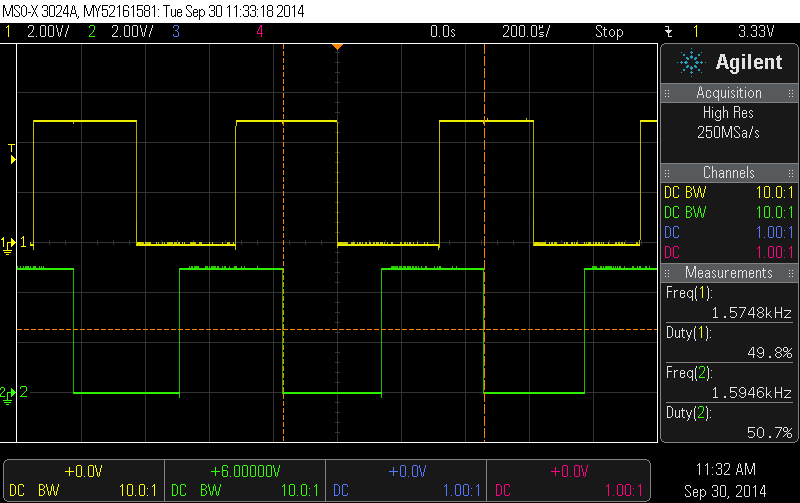
Outputs A and B of the magnetic encoder connected to the micro HP motor running at 6 V.
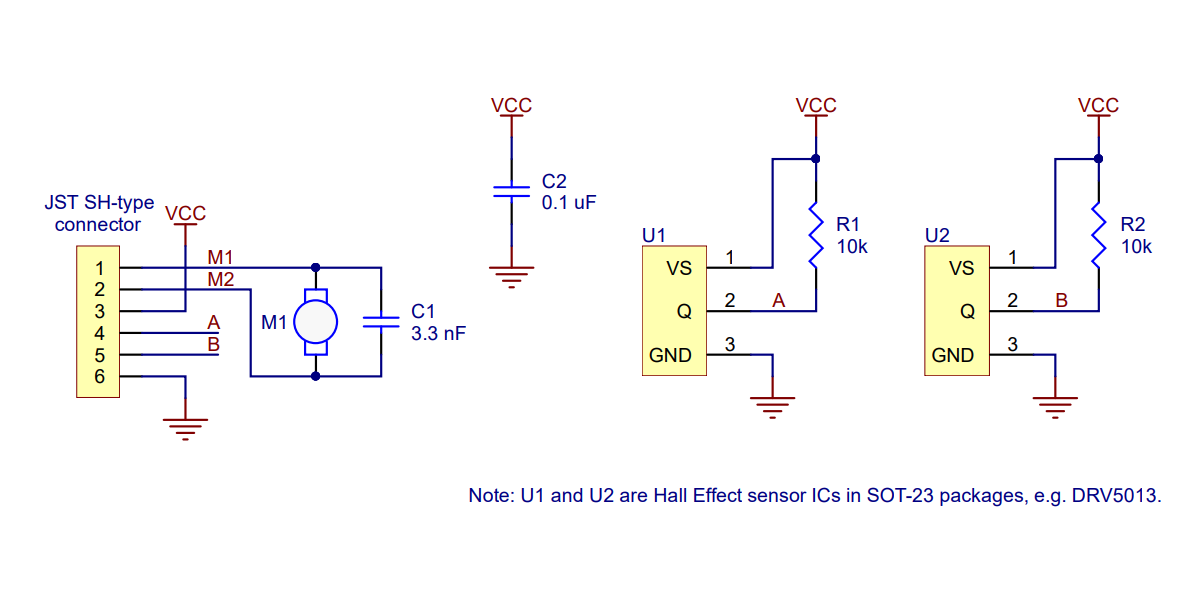
Encoder scheme.
Useful links |
| Niebezpieczne | Component |
| Package width | 8 cm |
| Package height | 0.5 cm |
| Package depth | 7.5 cm |
| Package weight | 0.004 kg |
Be the first to ask a question about this product!
Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin








