














































































































































































































































































































































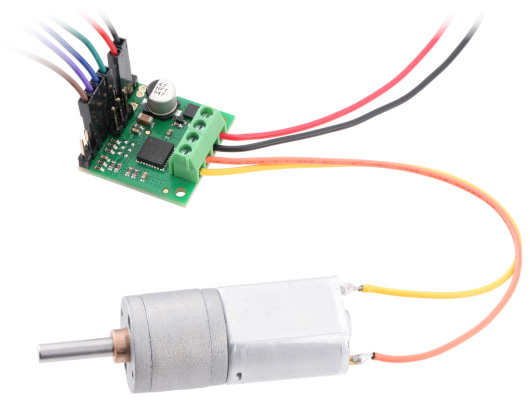
Single channel DC motor controller. Continuous current per channel 2.6 A (momentary up to 5 A). Supply voltage from 4.5 V to 28 V.
The modulebased on theTB9051FTGchip allows you tocontroloneDC motor. The motor can be supplied with voltagefrom 4.5V to 28Vwith continuous current up to 2.6A, momentary (for a few seconds) up to 5A. We recommend reading theTB9051FTGdocumentation before use.
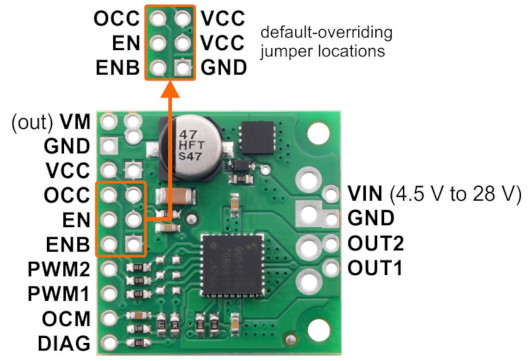
| PIN | Description |
|---|---|
| Vin | Motor supply voltage from 4.5 V to 28 V. It has protection against polarity change of supply voltage. |
| GND | System ground potential. |
| VM | Output providing access to the motor power supply after reverse polarity protection. It can be used to power other components of the system. |
| OUT1 | Outputs - to connect the motor leads. |
| OUT2 |
Outputs - to connect the motor leads. |
| VCC | Logic voltage - 5 V. |
| OCC | In case of overcurrent, the controller is switched off. By default in low state. If it is in high state it will automatically try to resume operation after a short time interval. |
| EN | When in the low state, the OUT1 and OUT2 outputs are set to the high impedance state. Inverted Inverted PWM can be applied to this pin(When EN is in the high state and PWM1 or PWM2 in the high state).Default is in the low state. |
| ENB | When it is in high state,OUT1 and OUT2 outputs are set to high impedance state.PWM can be applied to this pin(When ENB is in low state and PWM1 or PWM2 in high state).Default inhighstate. |
| PWM1 | Control input for OUT1. Default is low. |
| PWM2 | The control input for OUT2. Default low. |
| OCM | Current monitoring output, pin provides an analog feedback voltage of approximately 500 mV per amplifier. |
| DIAG | Error diagnostics output. goes low when errors occur or the controller is disabled by EN or ENB. |
|
Table for PWM1 + PWM2 mode |
||||||
| Input | Output | Operation mode | ||||
| EN | ENB | PWM1 | PWM2 | OUT1 | OUT2 | |
| 1 | 0 | PWM | 0 | PWM(H/L) | L |
Forward speed/brake speed at the speed specified: PWM % |
| 1 | 0 | 0 | PWM | L | PWM(H/L) |
Reverse/Brake at the speed specified: PWM % |
| 1 | 0 | 0 | 0 | L | L | Stop, outputs connected to ground |
| 1 | 0 | 1 | 1 | L | L | |
| 0 | X | X | X | Z | Z | Free runningOutputs disconnected |
| X | 1 | X | X | Z | Z | |
|
Table for PWM1 + PWM2 + EN mode |
||||||
| Input | Output | Operation mode | ||||
| EN | ENB | PWM1 | PWM2 | OUT1 | OUT2 | |
| PWM | 0 | 1 | 0 | PWM(H/Z) | PWM(L/Z) |
Forward speed/Free speed at the speed specified: PWM % |
| 0 | 1 | PWM(L/Z) | PWM(H/Z) |
Reverse speed/Free speed at the speed specified: PWM % |
||
| 0 | X | X | X | Z | Z | Free runningOutputs disconnected |
| X | 1 | X | X | Z | Z | |
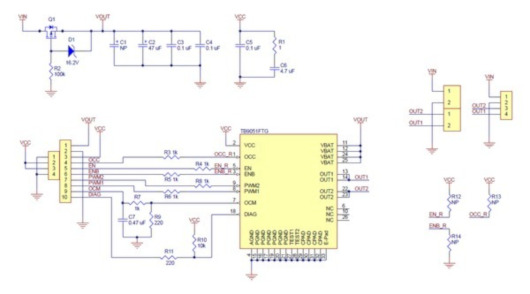
The circuit includes thecontrollerand the necessary passive elements for its proper operation. The electronic schematic is available on the drawing below.
Useful links |
| Voltage to | 4.5 V |
| Voltage from | 28.0 V |
| Current | 2.5 A |
| Channels | 1 |
| Package width | 8.5 cm |
| Package height | 0.6 cm |
| Package depth | 11 cm |
| Package weight | 0.007 kg |
Be the first to ask a question about this product!
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




