






















































































































































































































- Discontinued product
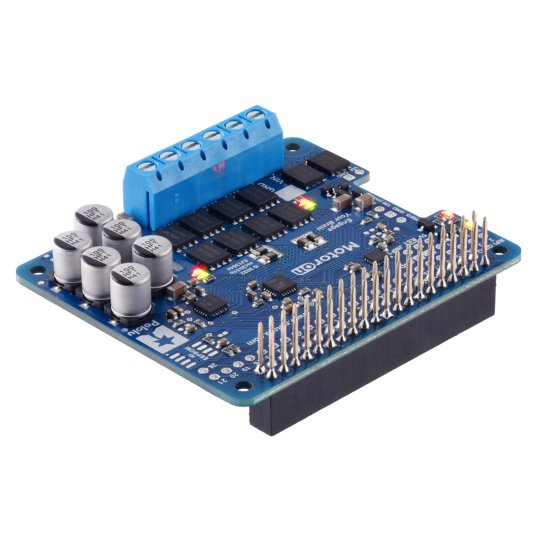
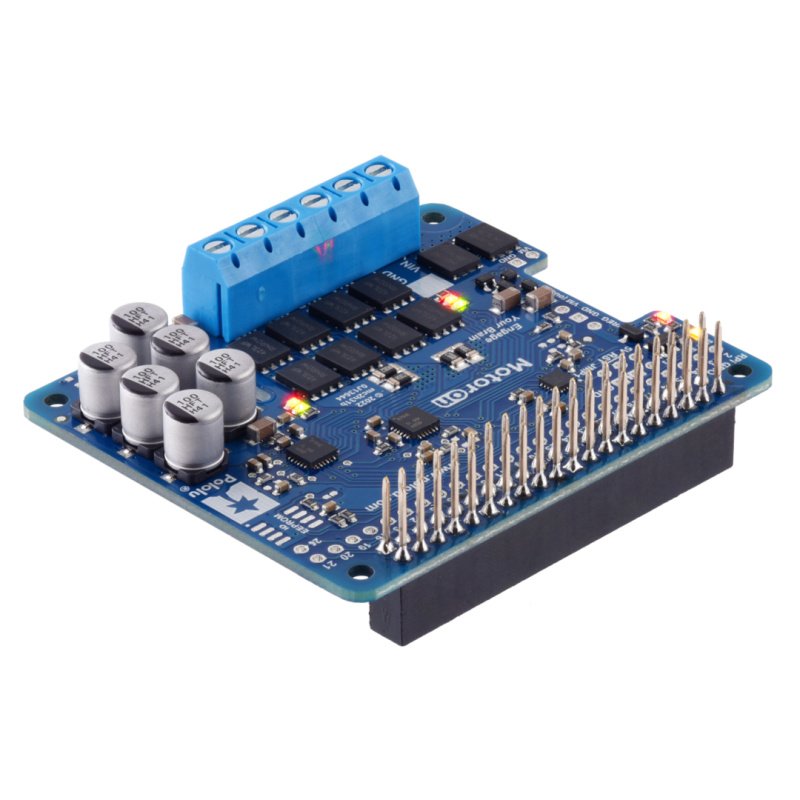












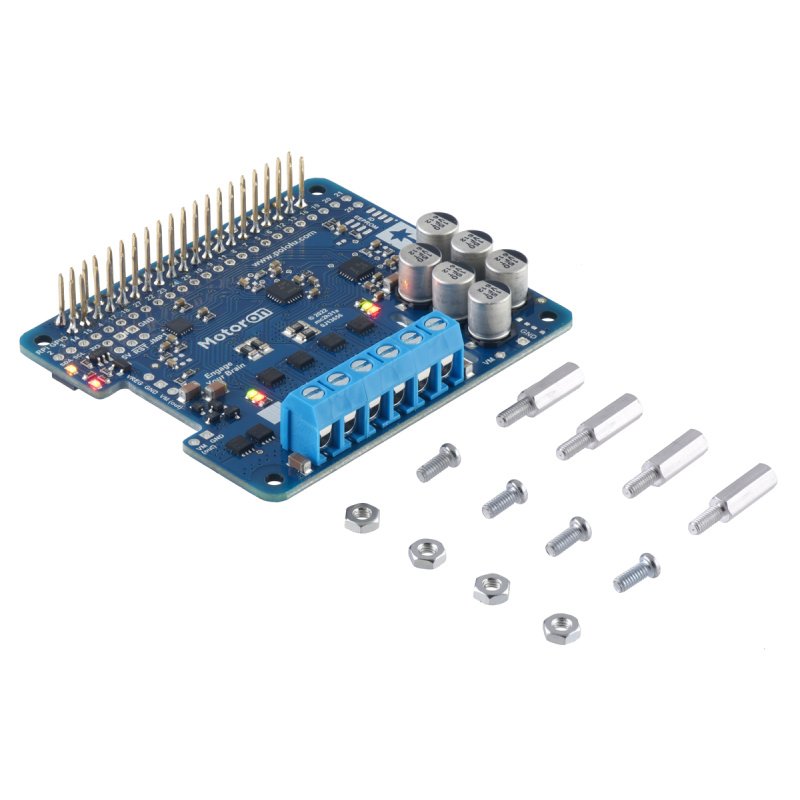
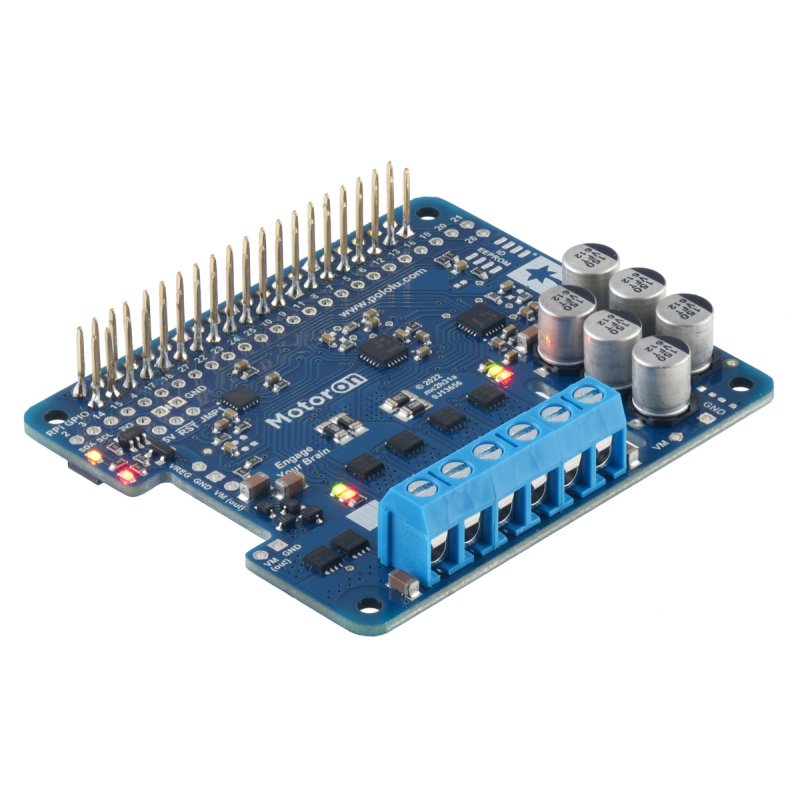
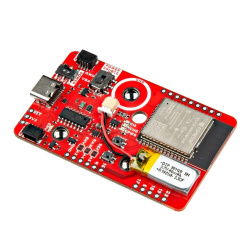
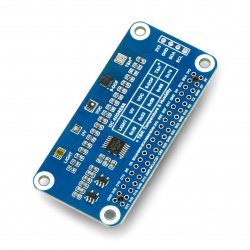
Two-channel Motoron M2H18v18 motor driver designed by Pololu in the form of an overlay for Raspberry Pi minicomputers. The module has a 40-pin connector to which you can connect other Raspberry Pi caps. The product communicates with the minicomputer via the I2C interface, so only two GPIO pins are needed to start working. The shield allows you to control two motors with a supply voltage from 6.5 V to 30 V and a current of up to 18 A.
The product is compatible with the Raspberry Pi !
Before starting work, also check the user's guide prepared by the manufacturer.
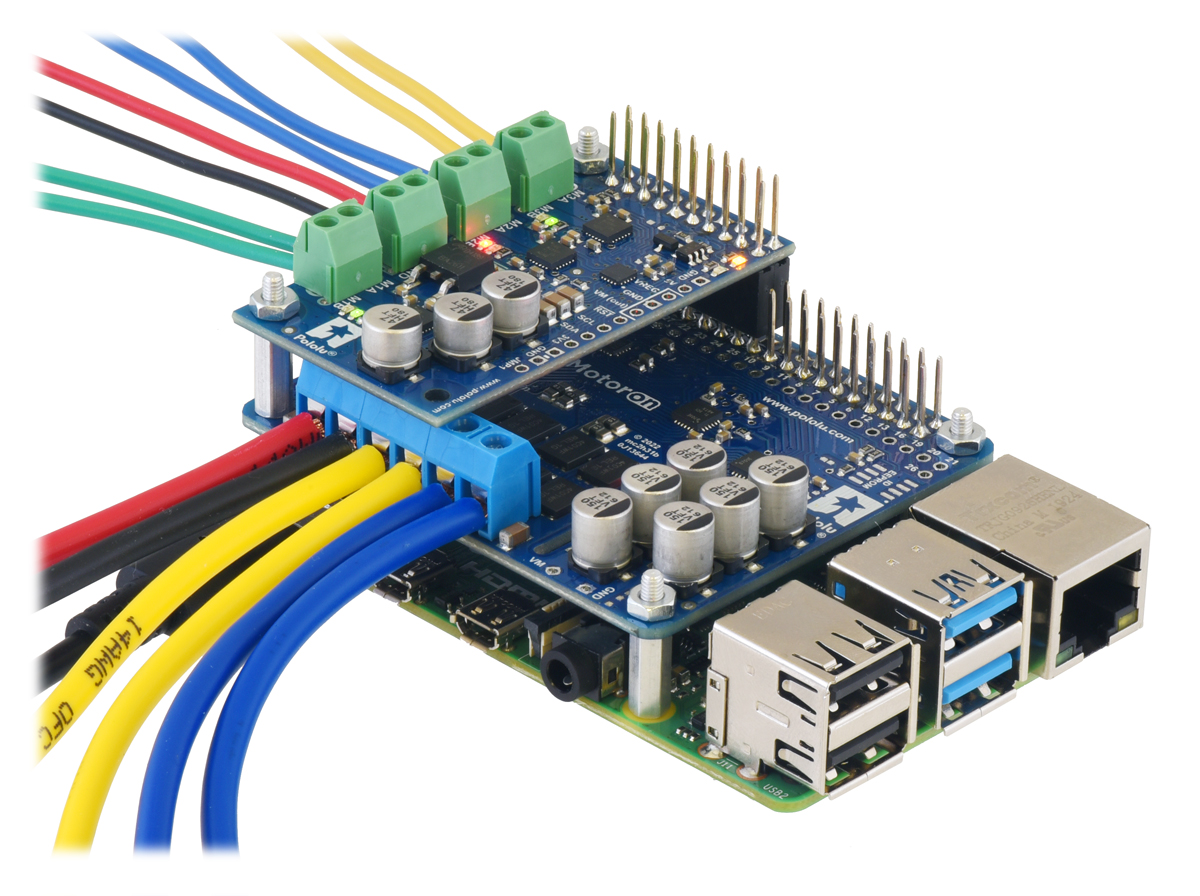
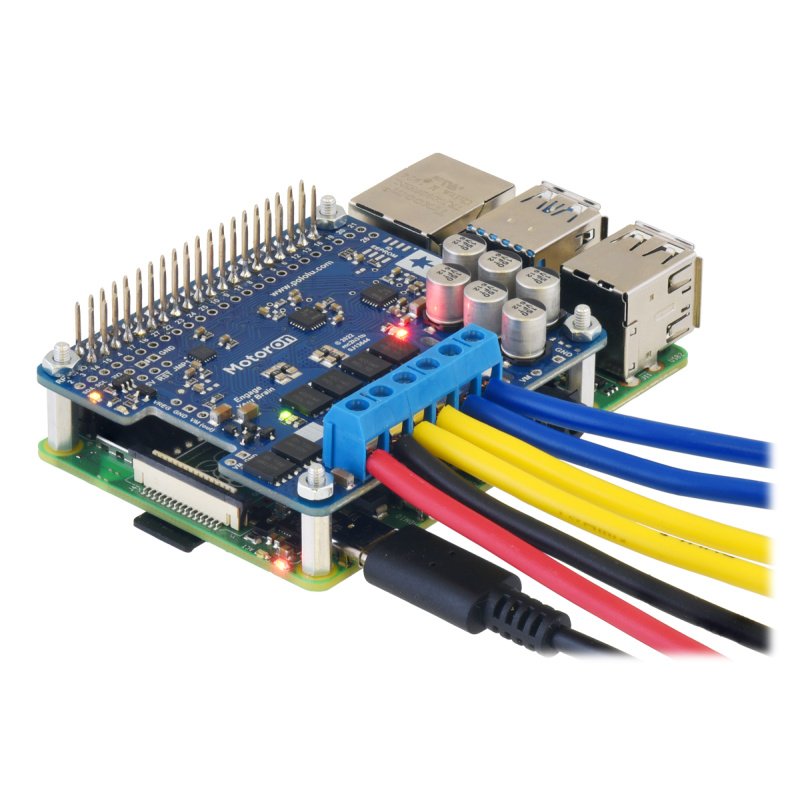
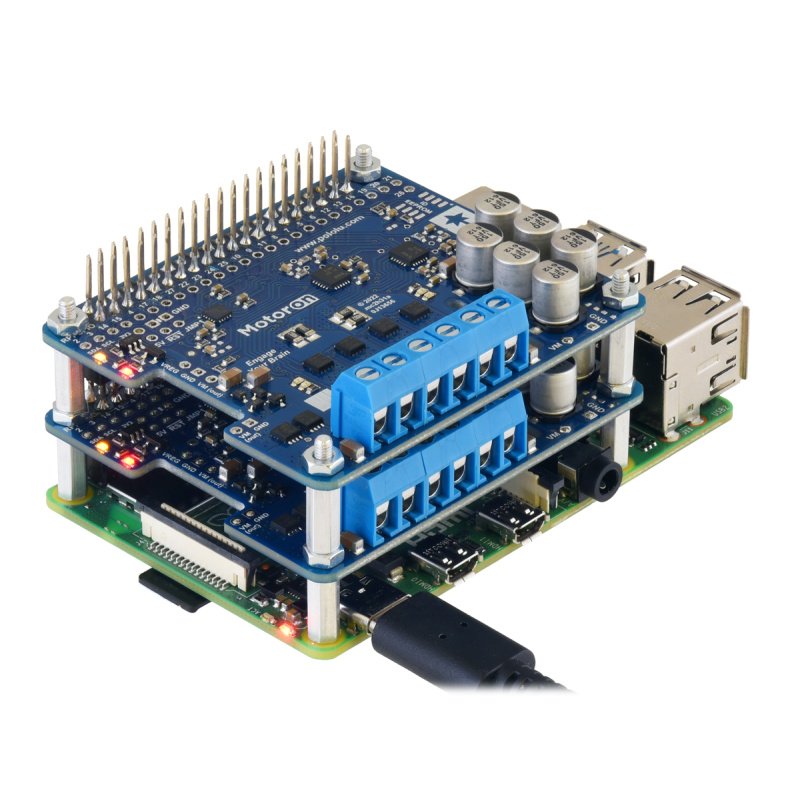
Motoron M2H18v18 two-channel motor driver - 30 V / 18 A - Raspberry Pi overlay - assembled - Pololu 5048 - connection example with Raspberry Pi and additional Motoron overlay.
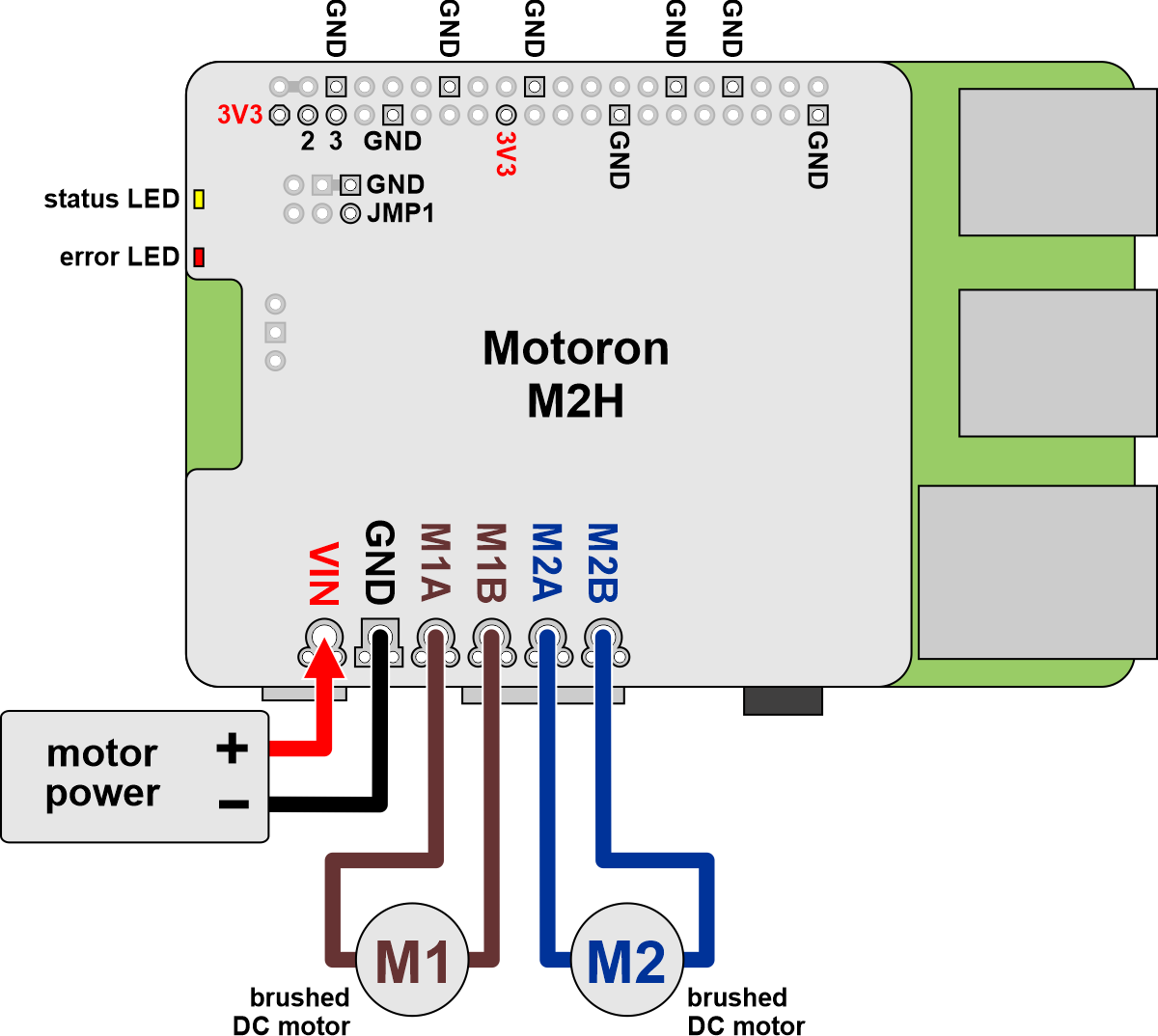
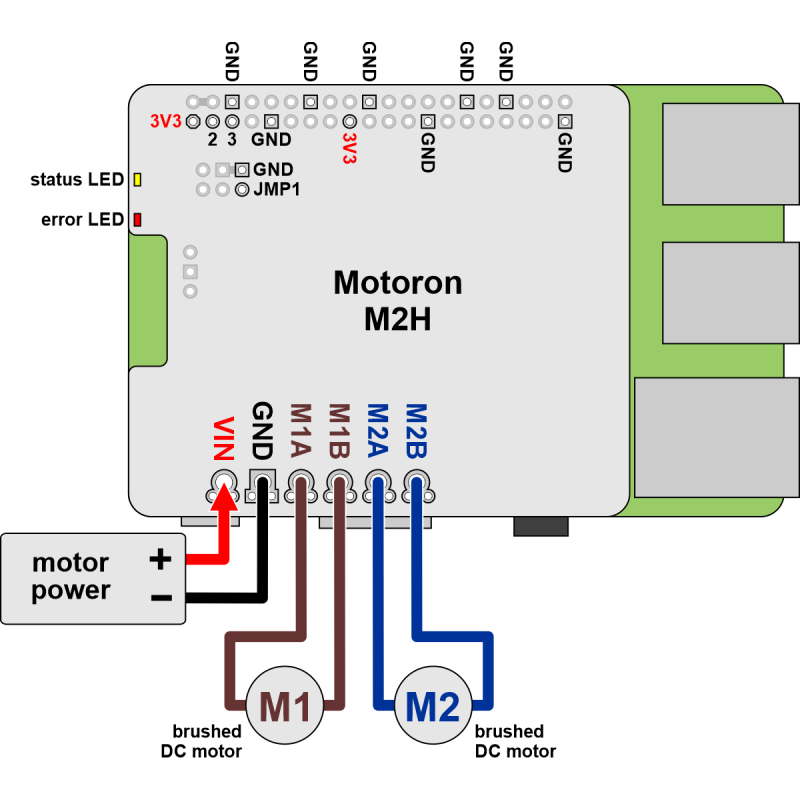
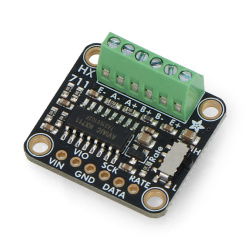
How to connect the controller with the motor? - Motoron driver connection diagram.
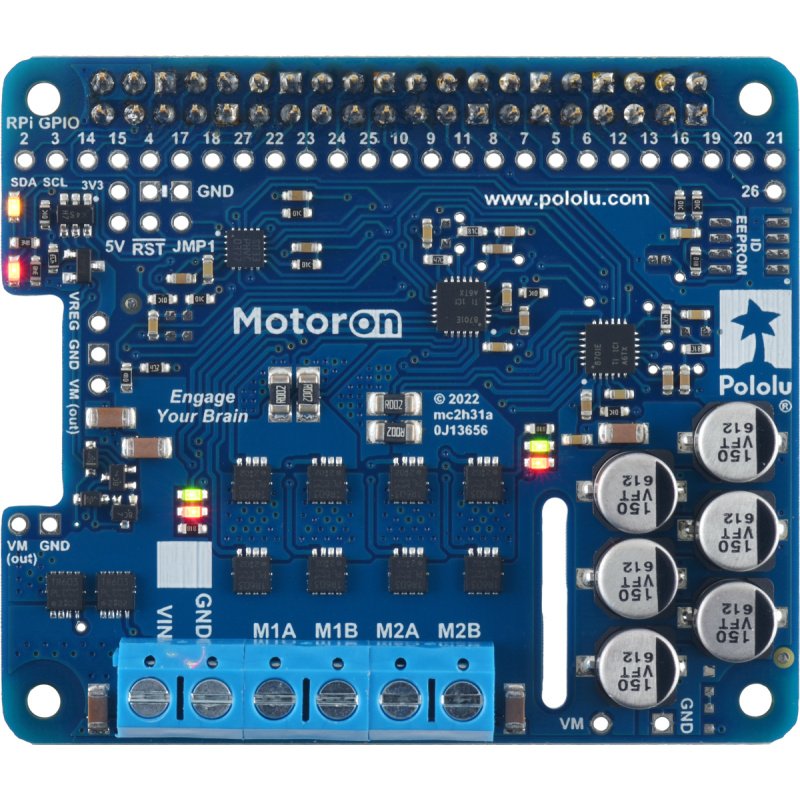
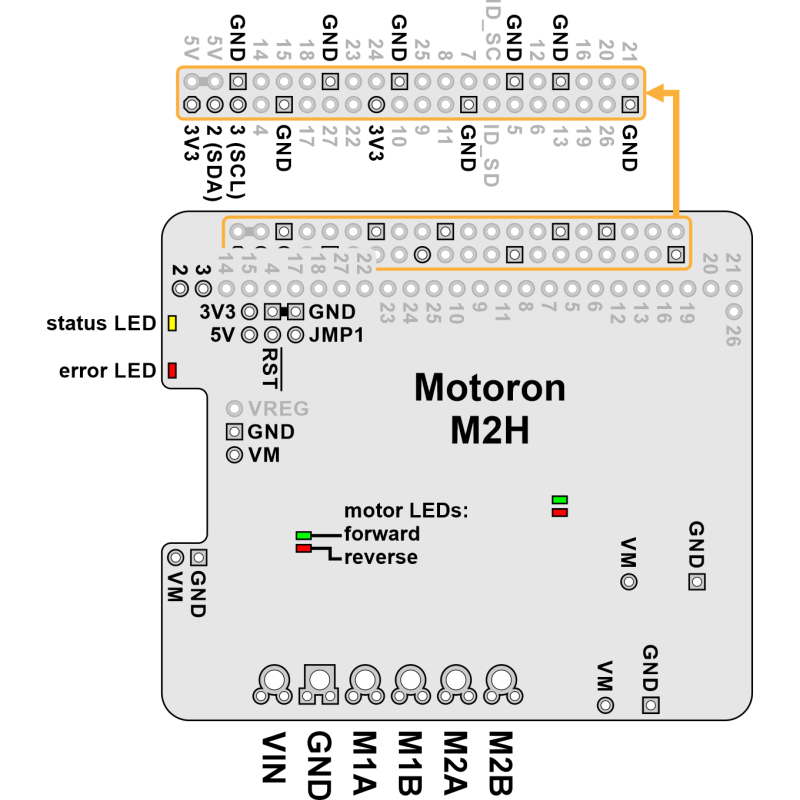
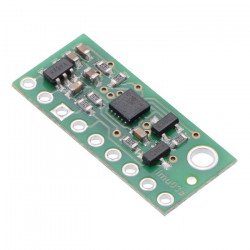
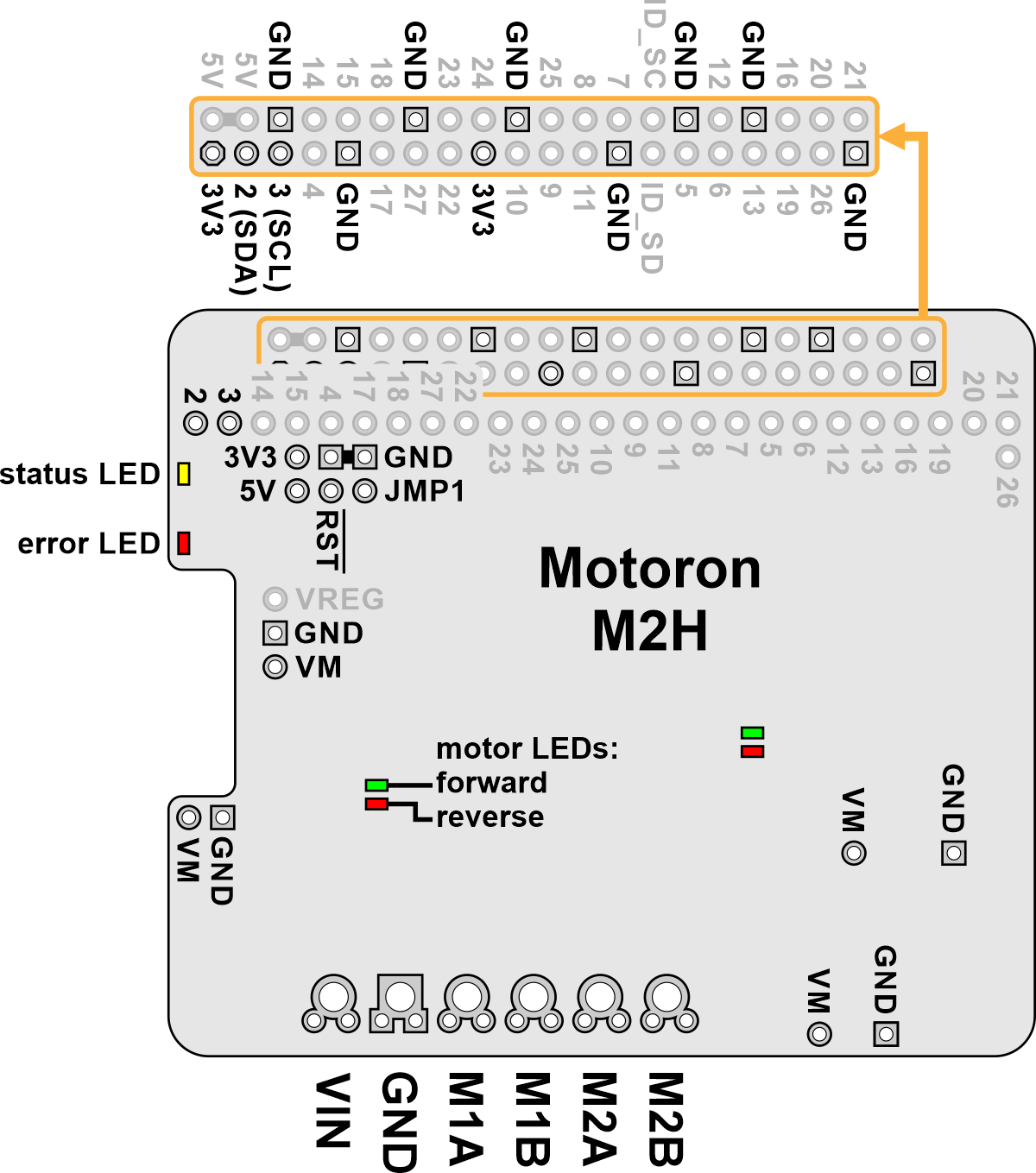 The arrangement of the pins of the Motoron driver.
The arrangement of the pins of the Motoron driver.
| Voltage to | 6.5 V |
| Voltage from | 30.0 V |
| Current | 18.0 A |
| Channels | 2 |
Be the first to ask a question about this product!
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin