


Stepper motor driver module based on the Texas Instruments DRV8434 chip with male pins installed for connection to a 16-pin socket or breadboard without the need for soldering . It allows you to control a stepper motor with a maximum current consumption of up to 2 A per coil and supports a supply voltage from 4.5 V to 48 V. It offers a wide selection of step resolutions, from full step to 1/256 step . It supports six current decay modes, including two intelligent adjustment modes that ensure smooth steps without the need for manual tuning. Current regulation using a built-in potentiometer allows the use of higher than rated voltages, which allows for higher step speeds. Thanks to the integrated voltage regulator, no additional power supply is required for the logic part. The module has the same size and pinout as the A4988 controller, which allows it to be directly replaced in many applications.
Our offer also includes drivers for stepper motors with other operating parameters.
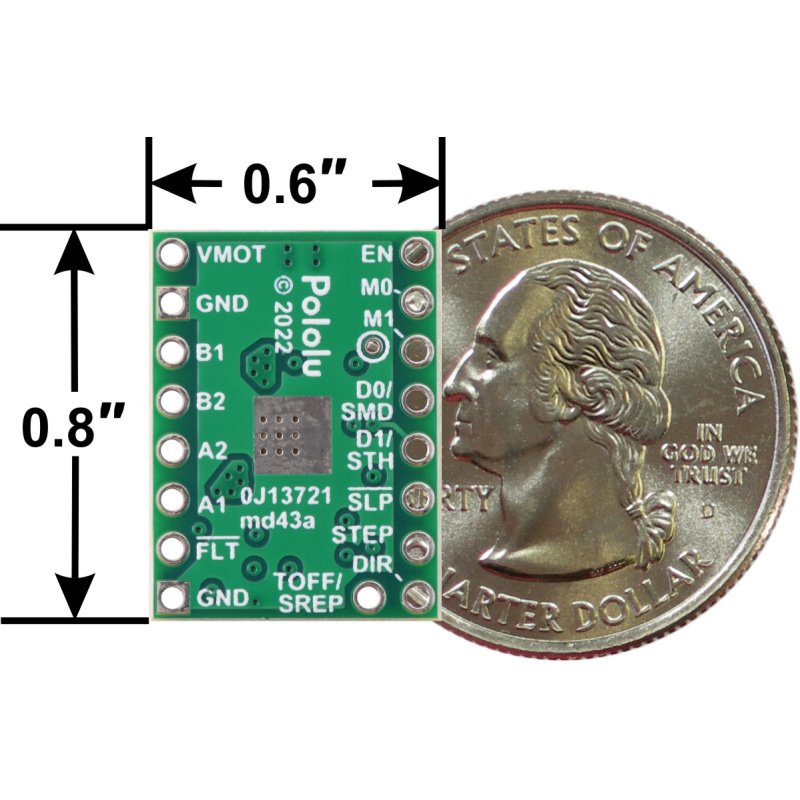
DRV8434 stepper motor driver 48 V / 2 A - with pin connectors - Pololu 3763.
Stepper motor driver module with the DRV8434 system.
The controller requires a motor supply voltage from 4.5 V to 48 V, which should be connected via VIN and GND. Please note that supply voltages below 6V limit the maximum current limit that can be set.
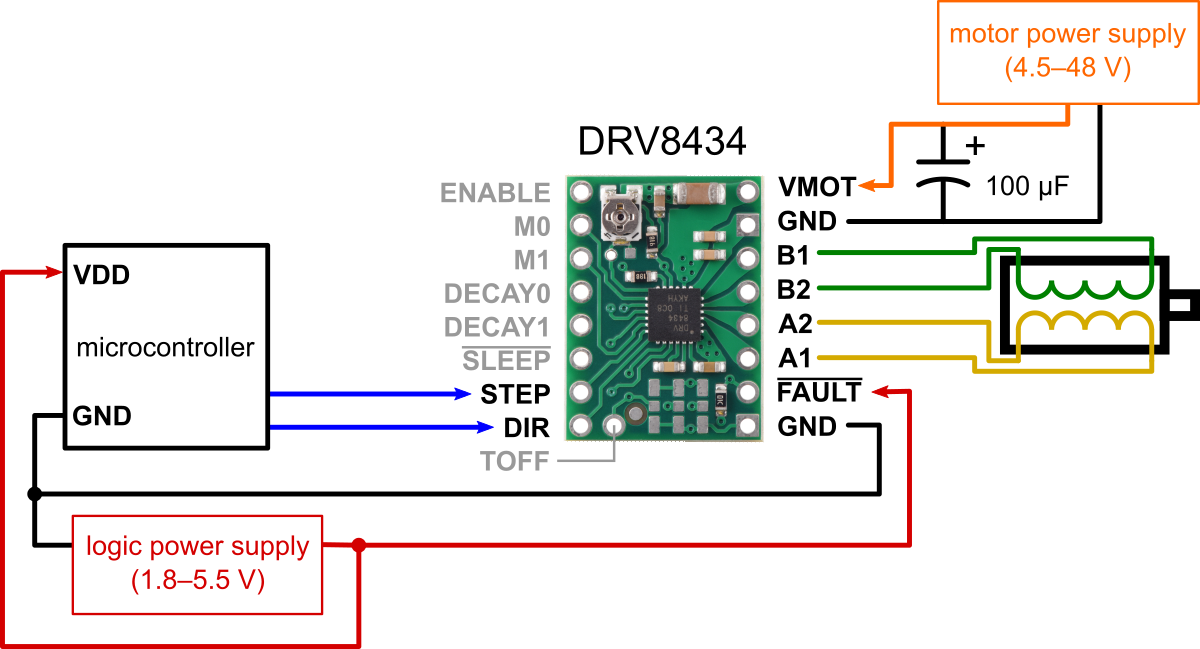
Module pinout diagram.
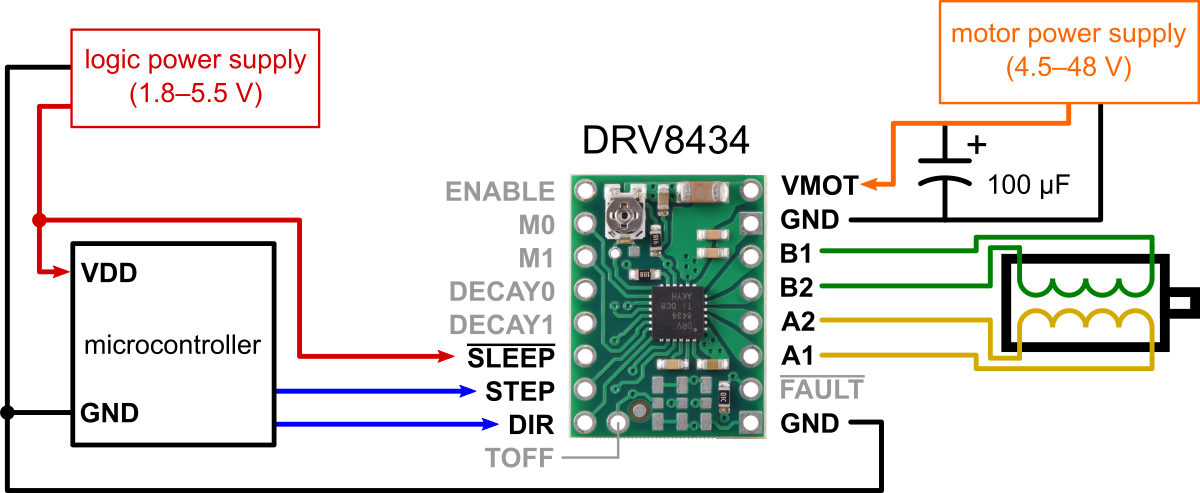
The system has two inputs for controlling power states: SLEEP and ENABLE.
The step size is selected using the M0 and M1 inputs. The method of obtaining the appropriate step resolution is presented in the table below.
| MODE0 | MODE1 | RESOLUTION |
| Low | Low | Full step with 100% current |
| High | 330 kΩ to GND | Full step with current 70% |
| High | Low | Less than 1/2 step |
| Hi-Z | Low | 1/2 step |
| Low | High | 1/4 step |
| High | High | 1/8 step |
| Hi-Z | High | 1/16 step |
| Low | Hi-Z | 1/32 of a step |
| Hi-Z | 330 kΩ to GND | 1/64 step |
| Hi-Z | Hi-Z | 1/128 step |
| High | Hi-Z | 1/256 step |
Current limiting is crucial to achieving high stepping speeds, especially when the motor power supply exceeds the nominal values. For example, a standard stepper motor might have a maximum current rating of 1 A with a coil resistance of 5 Ω, which would mean the maximum power supply to the motor is 5 V. Using a higher voltage, such as 9 V, allows for higher step speeds, but is necessary there is an active current limitation below 1 A to avoid motor damage.
The controller enables active current limitation by adjusting with a potentiometer. One way is to set the controller to full step mode and measure the current flowing through one coil without supplying a signal to the STEP input.
Alternatively, you can measure the voltage at the VREF pin and calculate the current limit. The current limit can be calculated using the following formula:
Current limit = VREF / 1.32
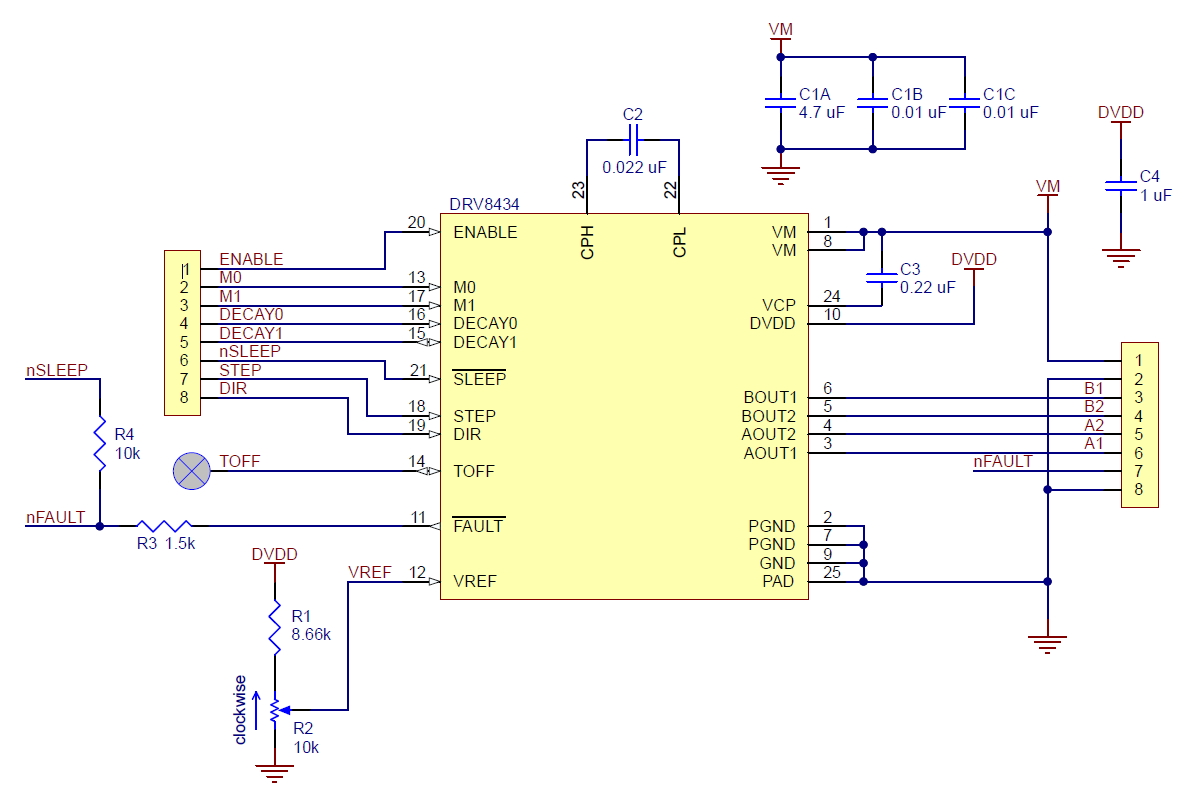
DRV8434 stepper motor driver carrier diagram.
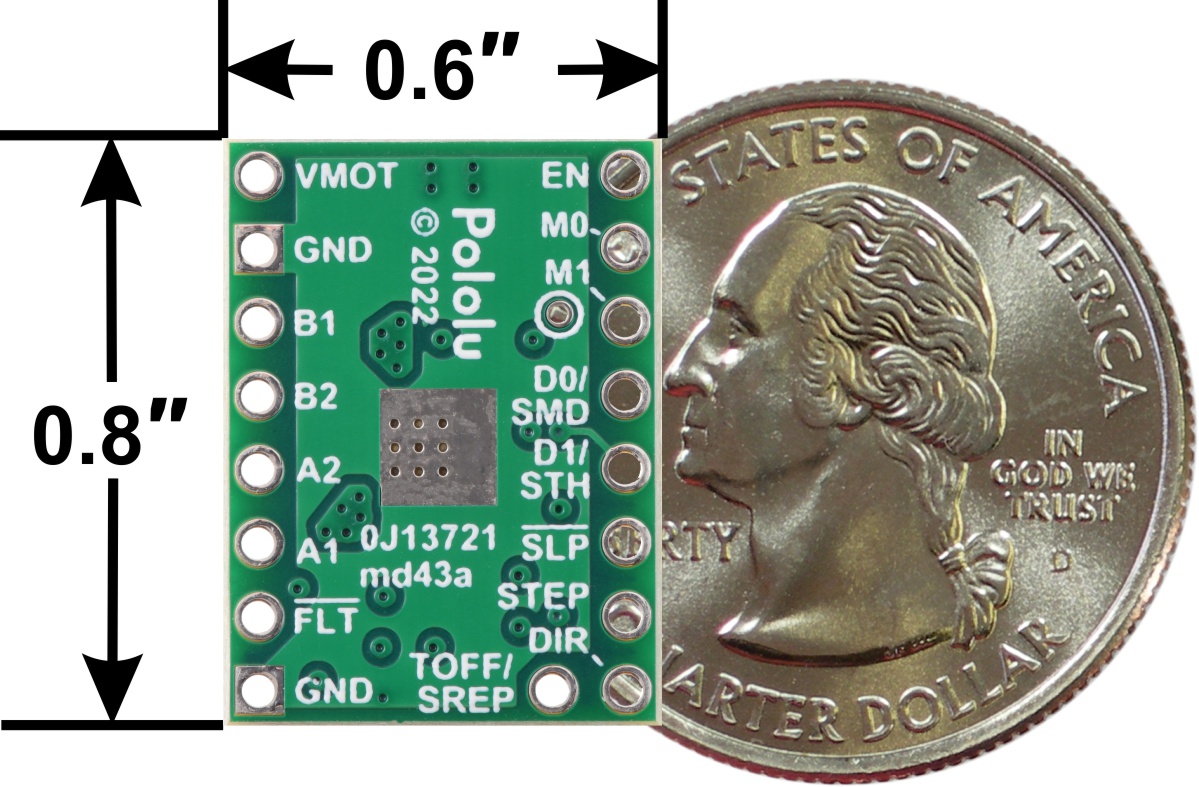
The size and pinouts of the module are compatible with the A4988 controller.
| Voltage to | 4.5 V |
| Voltage from | 48.0 V |
| Current | 1.2 A |
| Channels | 1 |
| Niebezpieczne | Component |
| Package width | 7 cm |
| Package height | 8.5 cm |
| Package depth | 1 cm |
| Package weight | 0.004 kg |
Be the first to ask a question about this product!
Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin