













































































































































































































































































































































Stepper motor driver based on the chip TB67S279FTG. Powered by a voltage range of 10 - 47 V, with a maximum current consumption of 4.5 A per coil. Maximum resolution: 1 / 32 steps. Thanks to the TB67S279FTG driver, the chip can dissipate more heat, which allows 1.6 A current flow without the heatsink. The module has soldered connectors.
The circuit allows to control a stepper motor with a device that allows to generate logic states e.g. Arduino.Arduino,STM32Discovoery,Raspberry Pior anymicrocontroller. Pololu module is characterized by very simple operation. Rising edge of each impulse on CLK (STEP) pin corresponds to one step. Selection of the direction is performed by giving the appropriate state to the CW/CCW (DIR) pin (e.g. low state - clockwise rotation, high state - anticlockwise rotation). The driver can also select theresolution ofmotor operation.
The module has soldered goldpin connectors.
We offer alsoversion without connectors.
TB67S249FTG - 47 V / 1,6 A stepper motor driver - with connectors - Pololu 3097.
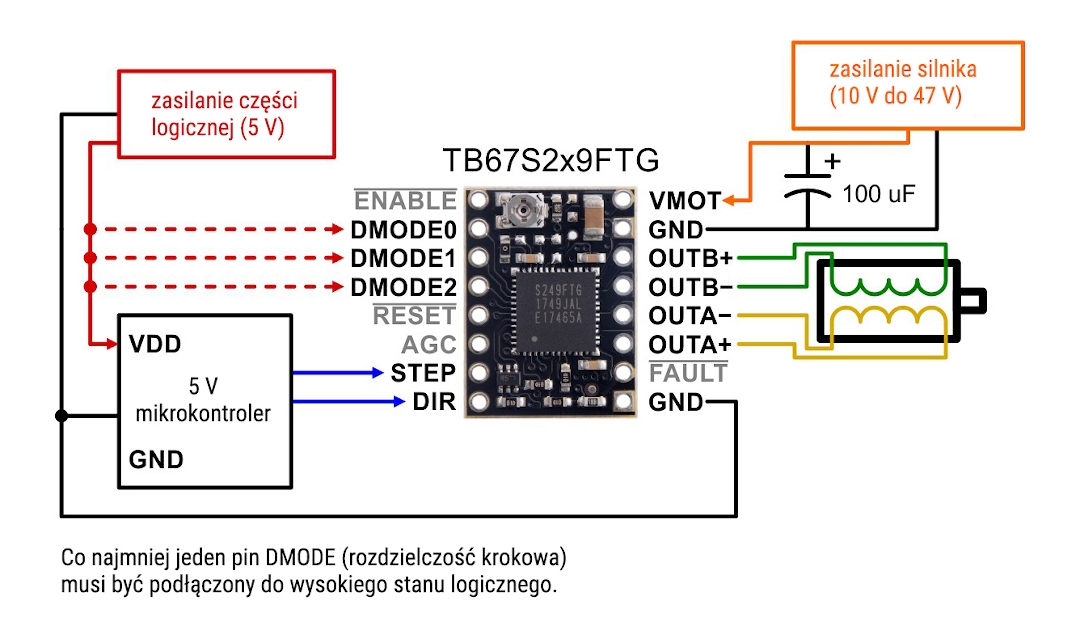
Minimum wiring diagram to connect microcontroller to TB67S2x9FTG.
The controller requires a supply voltage from 10 V to 47 V, which will be connected to VIN and GND terminals.
To control a bipolar stepper motor, connect the circuit as shown below.
To supply the logic part of the module a voltage of 5 V is required.VDD PIN. Motor supply voltage from 10 V to 47 V is applied to pinVIN PIN.
Caution!
Connecting and disconnecting the motor while the controller is on can damage the system.
The step size is selected using DMODE0, DMODE1, DMODE2 inputs. The possible settings are shown in the table below. The MS1, MS2 and MS3 inputs have an internal pull-down resistor (100 kΩ).
| MS1 | MS2 | MS3 | Resolution |
| low | low | low | Standby mode |
| low | low | high | Full step |
| low | high | low | Non-wheeling half step ('a') |
| low | high | high | 1/4 step |
| high | low | low | circular half step ("b") |
| high | low | high | 1/8 step |
| high | high | low | 1/16 step |
| high | high | high | 1/32nd step |
Control.
The rising edge of each pulse on the CLK (STEP) pin corresponds to one step. Selection of the direction is done by giving the appropriate state to the CW/CCW (DIR) pin (e.g. low state - clockwise rotation, high state - anticlockwise). Ifthe motoris to rotate in one direction only, the DIR pin can be left unplugged.
When the RESET pin goes high, the driver resets its state in the translator array, which outputs to the initial value of 45°. This corresponds to 100% of the current limit on both coils in full step and non-wheel half step modes. The RESET pin does not disable the motor outputs, the controller will continue to supply current to the motor but will not give information to the CLK output
The TB67S2x9FTG can detect several error conditions that report causing one or both LO pins to be low. The manufacturer has includeda table of error combinations on the LO1 and LO2 pinsin thedocumentation.
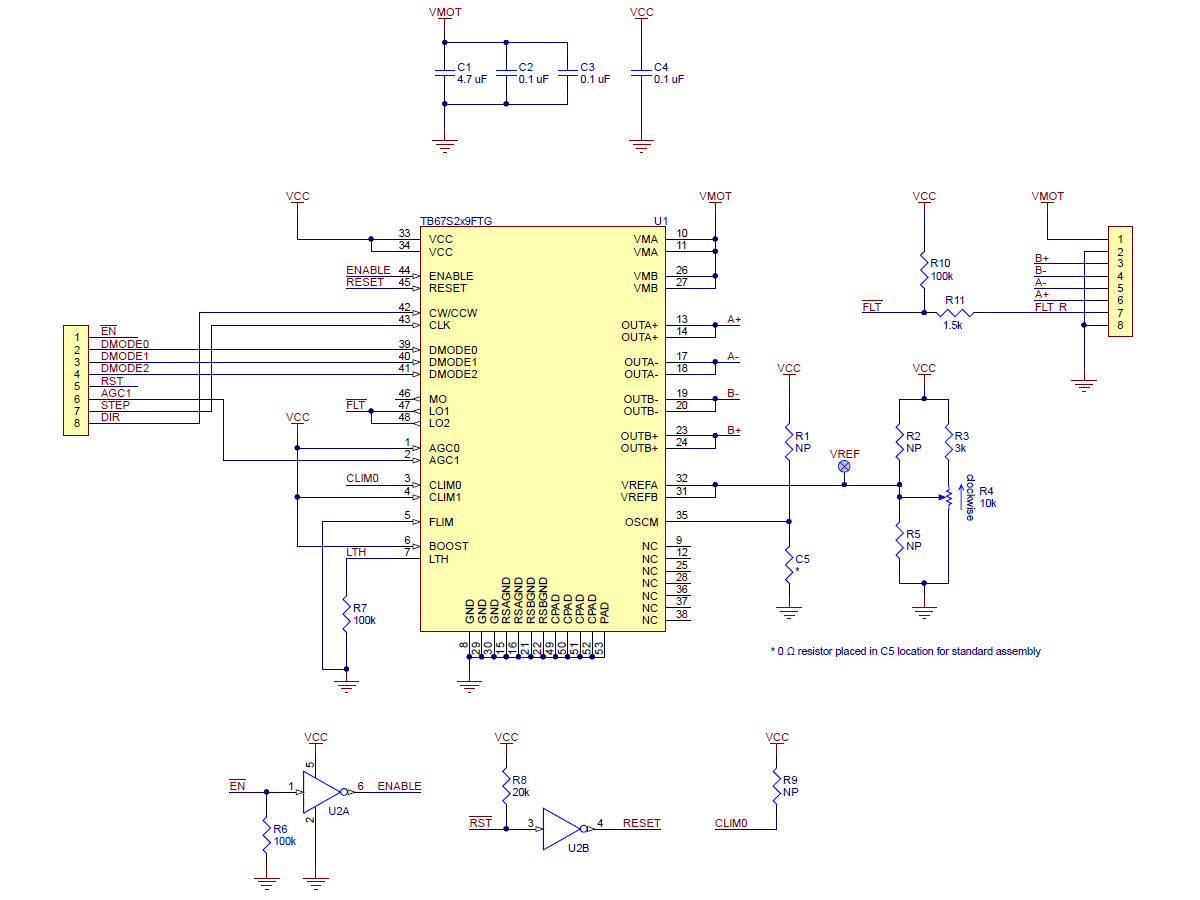
A detailed description of each pin can be found on themanufacturer's website.
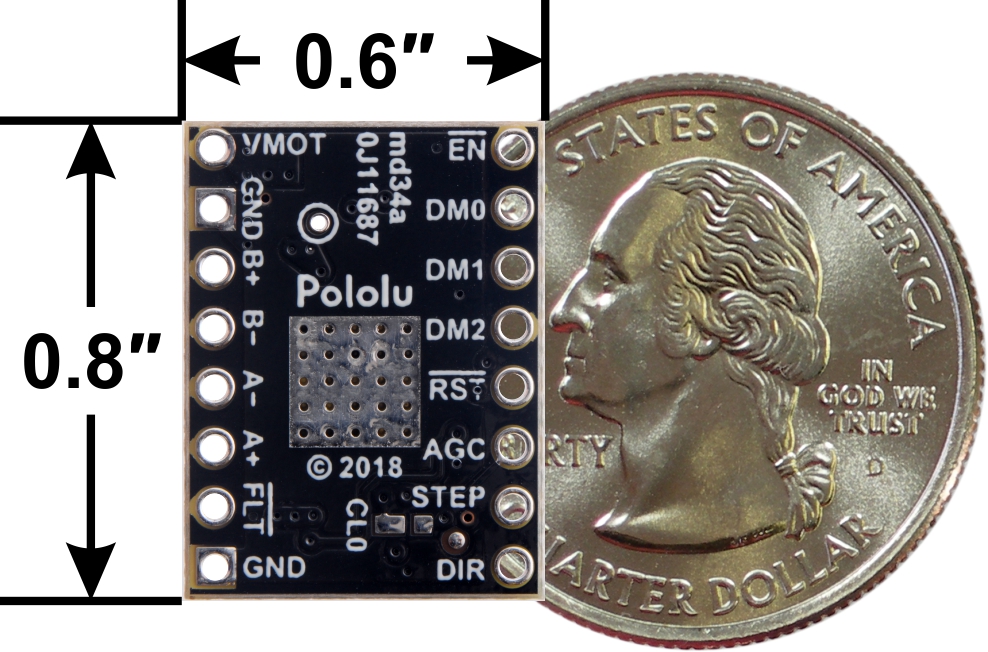
Controller dimensions.
| Voltage to | 10.0 V |
| Voltage from | 47.0 V |
| Current | 1.5 A |
| Channels | 1 |
| Niebezpieczne | Component |
| Package width | 8 cm |
| Package height | 1 cm |
| Package depth | 7 cm |
| Package weight | 0.004 kg |
Be the first to ask a question about this product!

Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.




