











































































































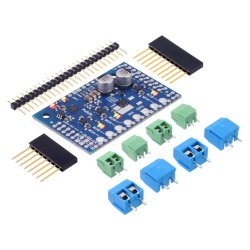



















































































































































































































Module allows control of two DC motors (DC) using Arduino kits. The system allows you to adjust the direction and speed of rotation of DC motors with a current consumption up to 2 A.
Module allows control of two DC motors (DC) using Arduino kits. The system allows you to adjust the direction and speed of rotation of DC motors with a current consumption up to 2 A. It also has the ability to quickly spot and measure the current consumed by connected motors.

To prevent damage to the computer port and the Arduino module through the consumption of a relatively large current through the motors, power supply line from USB was separated from the power supply of the motors themselves. The manufacturer recommends connecting an external power source. For this purpose you can use the power supply DC or any battery. The user can also supply separately an Arduinomodule and the Motor Shield. It is necessary to disconnect the jumper Vin Connect, located on the back of the board. This may be the case if the supply voltage is above 12 V.

Motor Shield power supply connector. By default connected (left). To disconnect the power supply, you have to break the connection (in accordance with the red line on the figure to the right).
Shield works on the basis of the dual driver L298 motors. This means that the user has the possibility of connecting two motors with a maximum current consumption up to 2A each. Shield uses 8Arduino outputs:
| Function | A channel pins | B channel pins |
|---|---|---|
| Direction | D12 | D13 |
| PWM | D3 | D11 |
| Braking | D9 | D8 |
| Current measurement |
A0 |
A1 |
If the brake or the measuring currentfunction is not used, it is possible to keep on using output D9, D8, A0 and A1 as general purposeinput/output. To do that, you need to break jumpers located on the bottom of Motor Shield:

Jumpers connected bydefault. Braking and current measurement is possible.

To disable the brake and current measurementfunction and use the outputs as general input/outputs, you should terminate the connection in accordance with the red line on the figure above.
The motors should be connected to the ARKconnector, located in the left bottom part of the shield. The connectors are very practical, allow for the installation of any cable by screwing it on with a screwdriver. The way you connect the motor outputs determines in what direction it is spinning, if controlledcorrectly.

Useful links |
| Package width | 6.1 cm |
| Package height | 3.8 cm |
| Package depth | 8.5 cm |
| Package weight | 0.047 kg |
Be the first to ask a question about this product!

Country of Origin: Poland














