












































































































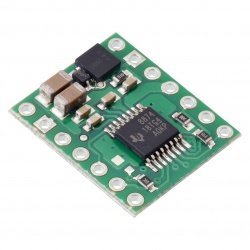























































































































































































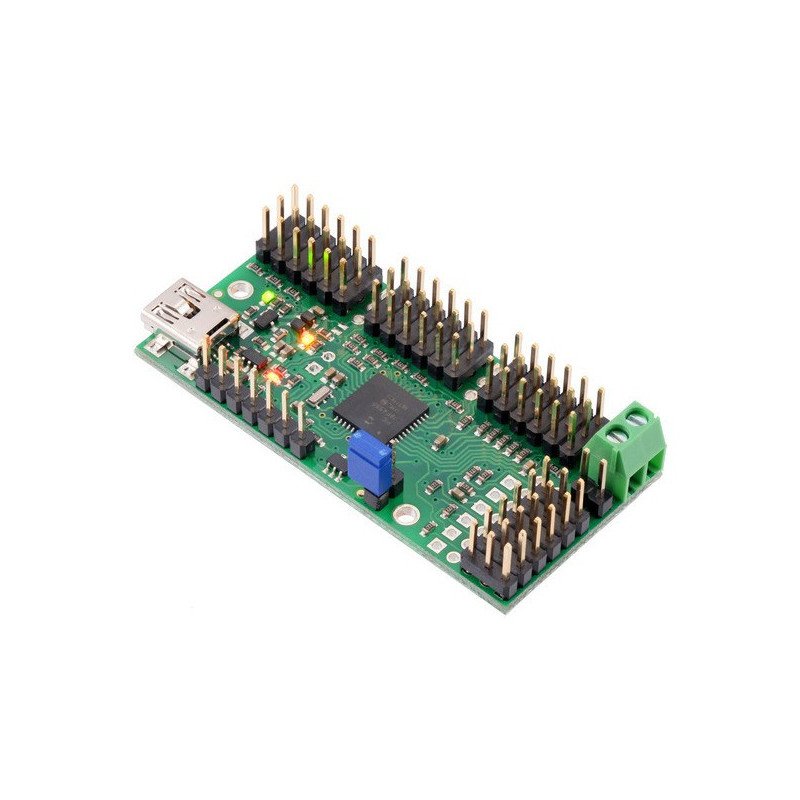










A 24-channel servo controller with support for digital and analog signals. The user can control servos via: PC application (USB), serial interface and simple script language.
The Maestro series are versatile servo controllers also capable of interpreting digital and analog signals. With a variety of control options, a wide range of supply voltages, and simple operation, the Maestro works well for many projects using servos. Depending on the number of servos used, the user can choose the appropriate version. Available are 6, 12, 18 and 24 channel modules.
|
Product compatible with Arduino The manufacturer makes the library available on GitHub for Arduino users. |
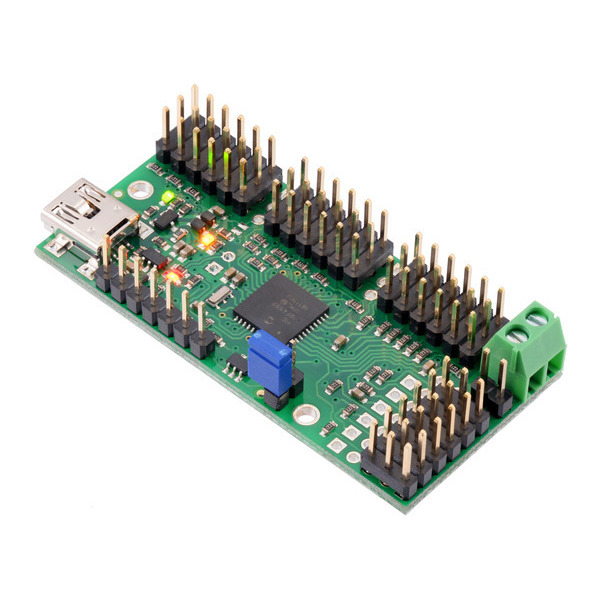
Mini Maestro USB 24 channel servo controller - Pololu 1356.
The user can customize the controller to the needs of his project, choosing from three different communication interfaces:
USB computer application - the device connects to the computer via a mini USB cable. An intuitive program is used to operate the controller, which allows, among others:
|
|
|
|
||
| Number of channels: | 6 | 12 | 18 | 24 |
| Number of analog inputs: | 6 | 12 | 12 | 12 |
| Number of digital inputs: | 0 | 0 | 6 | 12 |
| Width [mm]: | 21,6 | 27,9 | 27,9 | 27,9 |
| Length [mm]: | 30,5 | 36,1 | 45,7 | 58,4 |
| Weight [g]: | 3,0 | 4,2 | 4,9 | 6,0 |
| Pulse frequency: | 33-100 Hz | 1-333 Hz | 1-333 Hz | 1-333 Hz |
| Pulse range: | 64-3280 μs | 64-4080 μs | 64-4080 μs | 64-4080 μs |
| Script size: | 1 KB | 8 KB | 8 KB | 8 KB |
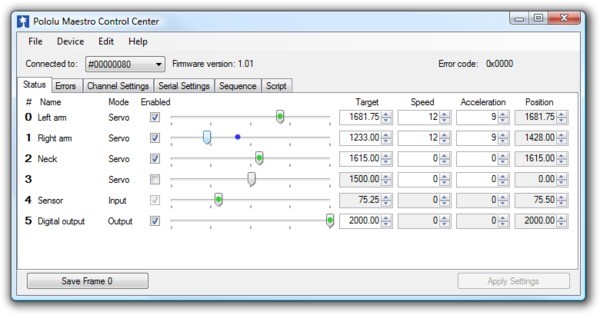
Computer application that allows to control servo position and speed, read and write I/O statuses via USB cable.
Script - by selecting this option, the user can create and store the selected sequence of events in the Maestro memory, e.g. make the servo position dependent on the voltage level at the analog input to which any analog sensor is connected, e.g. a gyroscope, accelerometer or distance meter. A description of the scripting language together with examples of usage can be found on found in the manual.
Serial interface (UART) - the interface allows to connect Maestro to the central unit, which can be any microcontroller or runtime kit like Arduino, STM32Discovery or Rasbperry Pi. Servos are operated by sending special character commands. Examples along with a description of commands can be found in the manual.
Pinouts are popular goldpin strips (raster 2,54), matching standard servo connectors and connection wires.
On the board you will find:
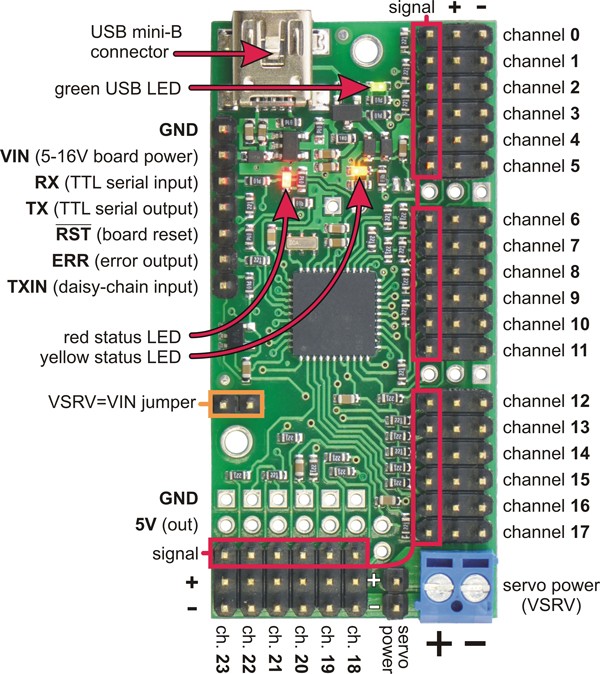
Pinout of the Maestro controller.
A video made by Pololu presenting the capabilities of the product.
| Voltage to | 5.0 V |
| Voltage from | 16.0 V |
| Current | sources |
| Channels | 24 |
| Package width | 10.3 cm |
| Package height | 1.5 cm |
| Package depth | 9.5 cm |
| Package weight | 0.014 kg |
Be the first to ask a question about this product!



 Micro
Micro

















