














































































































































































































































































































































Dual channel DC motor controller. Continuous current per channel 1,7 A (momentary up to 4,5 A). Supply voltage from 10 V to 47 V.
The module based on theTB67H420FTGchip allows you tocontrolup totwoDC motors. The motor can be supplied with voltagefrom 10 V to 47 Vat continuous current up to 1.7 A, momentary (for a few seconds) up to 4.5 A. We recommend reading theTB67H420FTGdocumentation before use.
| PIN | Description |
|---|---|
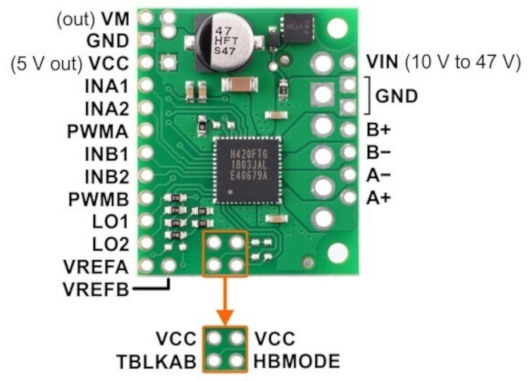
| Vin | Motor supply voltage from 10 V to 47 V. It has protection against polarity change of supply voltage (up to 40 V). |
| GND | System ground potential. |
| VM | Output to provide power to the motor after reverse polarity protection. It can be used to power other components of the system. |
| A+ | Motor outputs A. To be connected for single channel mode. |
| A- |
|
| B+ | B motor outputs. To be connected for single channel mode. |
| B- | |
| VCC | Adjustable 5 volt output. This pin gives access to the voltage from the TB67H420FTG internal regulator. The output should only be used for logic inputs as it can only provide a few milliamps. |
| INA1 |
Control input forA+.PWM can be applied to this pin (usually PWMA in the high state). Default state is low. In single channel mode it controlsA+andA-. |
| INA2 |
Control input forA-.PWM can be applied to this pin (usually PWMA in the high state). Default state is low. In single channel mode, controlsB+andB-. |
| PWMA |
PWM input for channelA. Default state low. In single channel mode, the PWM input. |
| INB1 | Control input forB+.PWM can be applied to this pin (usually PWMB in high state). Default state is low. |
| INB2 | Control input forB-..PWM can be applied to this pin (usually PWMB in the high state). Default state is low. |
| PWMB | PWM input for channelB. Default state low. |
| LO1 |
Error diagnostics output. Goes low when an error occurs due to excessive current or temperature. Default state is high. |
| LO2 | Error diagnostics output. Goes low when load or temperature fault occurs. Default is low. |
| VREFA | The output indicates the current threshold value for channelA.In single channel mode, outputs the current threshold value. |
| VREFB | The output indicates the current threshold value for channelB. |
| TBLKAB | Noise filter configuration pin for the constant current circuit. Default is low. Input should not be changed when the controller is powered. |
| HBMODE | Operating mode configuration input, High state for single channel mode, low state for dual channel trub.This input should not be changed when the controller is powered. |

|
Complete truth table for TB67H420FTG |
||||||
| Input | Output | Operating mode | ||||
| PWMx | INx1 | INx2 | x+ | x- | ||
| 0 | 0 | 0 | Z | Z |
Free running. Standby mode if all PWM and IN inputs are in the low state. |
|
| 1 | 0 | L | L |
Stop |
||
| 0 | 1 | |||||
| 1 | 1 | |||||
| 1 | 0 | 0 |
Z | Z | Free running | |
| 1 | 0 | H | L | Forward speed | ||
| 0 | 1 | L | H | Reverse rotation | ||
| 1 | 1 | L | L | Stop | ||
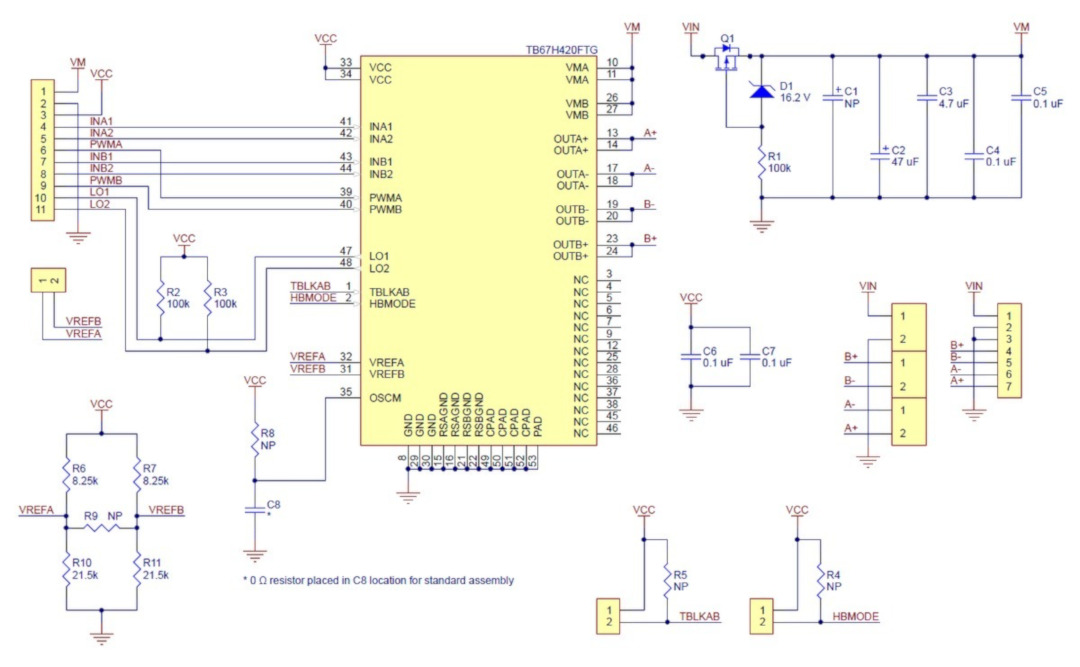
The system includes the controller and the necessary passive elements for its proper operation. Electronic circuit diagram is available on the drawing below.
Useful links |
| Voltage to | 10.0 V |
| Voltage from | 4.2 V |
| Current | 3.4 A |
| Channels | 2 |
| Niebezpieczne | Component |
| Package width | 8.5 cm |
| Package height | 8.3 cm |
| Package depth | 8 cm |
| Package weight | 0.008 kg |
Be the first to ask a question about this product!

Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin





