















































































































































































































































































































































Single-channel DC motor controller. Continuous current per channel 1.7 A (momentary to 2.5 A). Supply voltage from 4.5 V to 36 V.
The module based on the MAX14870 Instruments system allows to control one DC motor. The motor can be powered from 4.5 V to 36 V with a continuous current draw of up to 1.7 A, temporary (for a few seconds) to 2.5 A. Before use, we recommend to read thedocumentation ofthe MAX14870.

In a typical application, it is enough to connect two control lines: DIR direction selection and PWM speed control. By default, the PWM signal on the board is pulled up to ground by a 100 kΩ resistor, so the controller is switched off. If there is no need to use speed control, a high state (logical one) must be specified on the PWM output.
The EN or ENABLE output disconnects the motor outputs. If the high state is given, the M1 and M2 outputs are in high impedance state. The EN is pulled to ground by a 100 kΩ resistor, which means that the circuit is switched on by default.
| EN | PWM | DIR | M1 | M2 | Mode of operation |
|---|---|---|---|---|---|
| 1 | X | X |
high impedance |
high impedance |
disconnected outputs idle |
| 0 | 1 | 0 | GND | VIN | forward revolutions |
| 0 | 1 | 1 | VIN | GND | backwards |
| 0 | 0 | X | GND | GND |
braking outputs connected to the ground |
1 - high state, 0 - low state, X - unconnected output

| PIN | Description |
|---|---|
| Vin | Motor supply voltage from 4.5 V to 36 V. |
| GND | The mass potential of the system. |
| M1 | Outputs + to connect the motor outputs. |
| M2 | Outputs - to connect the motor outputs. |
| DIR | Logical input defining the direction of engine rotation. |
| PWM | Logical input for speed setting. A PWM signal must be connected to this output. Default is low. |
| EN | Logical input that switches the system to the sleep state when low state is given. Default is high state. |
| FAULT | Logical output indicating error in low state. Not connected by default. |
The system has the ability to limit the motor current. To do so, cut the path as shown in the drawing:
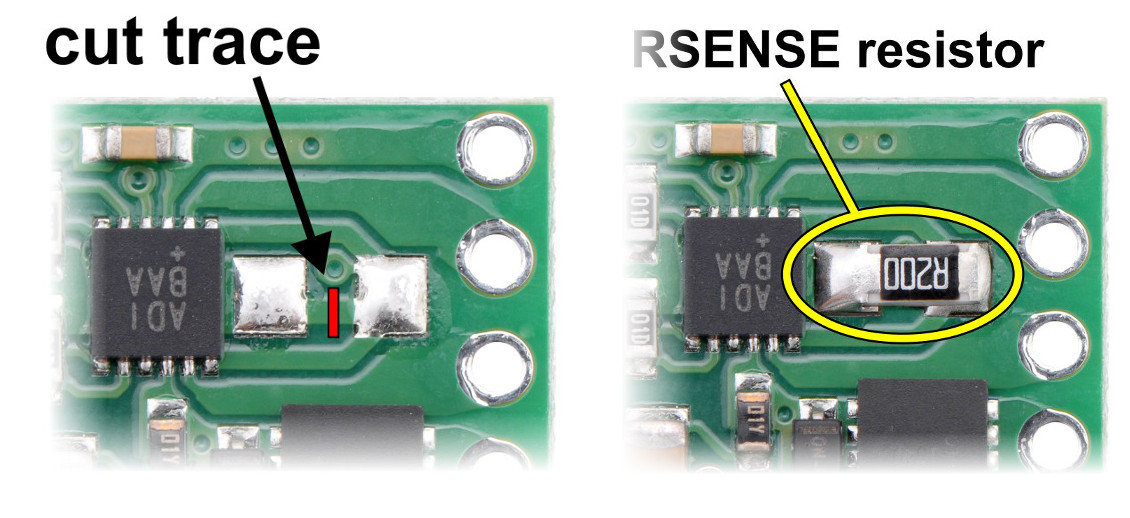
then solder the resistor in SMD 1206 housing. 100 mΩ resistor will limit current to 1 A, 200 mΩ to 0.5 A etc. See thedocumentationfor details.
Film describing the operation of the H-bridge - direct current motor controller.
Useful links |
| Voltage to | 4.5 V |
| Voltage from | 36 V |
| Current | 1.7 A |
| Channels | 1 |
| Niebezpieczne | Component |
| Package width | 7.7 cm |
| Package height | 8.5 cm |
| Package depth | 0.1 cm |
| Package weight | 0.002 kg |
Be the first to ask a question about this product!

Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin






