














































































































































































































































































































































Stepper motor driver powered from 1,8 V to 10 V. Maximum resolution: 1/256 koku. Can operate without heat sink or forced air flow at 1.1 A per phase.
The system allows to control a singlebipolar stepper motor. It offers a wide range of step resolutions (from full to 1/256 steps). By setting the current-voltage parameters, higher step speeds are possible.
STSPIN220 works directly with 3.3 V and 5 V systems. The diagram below shows how to connect to a microcontroller.
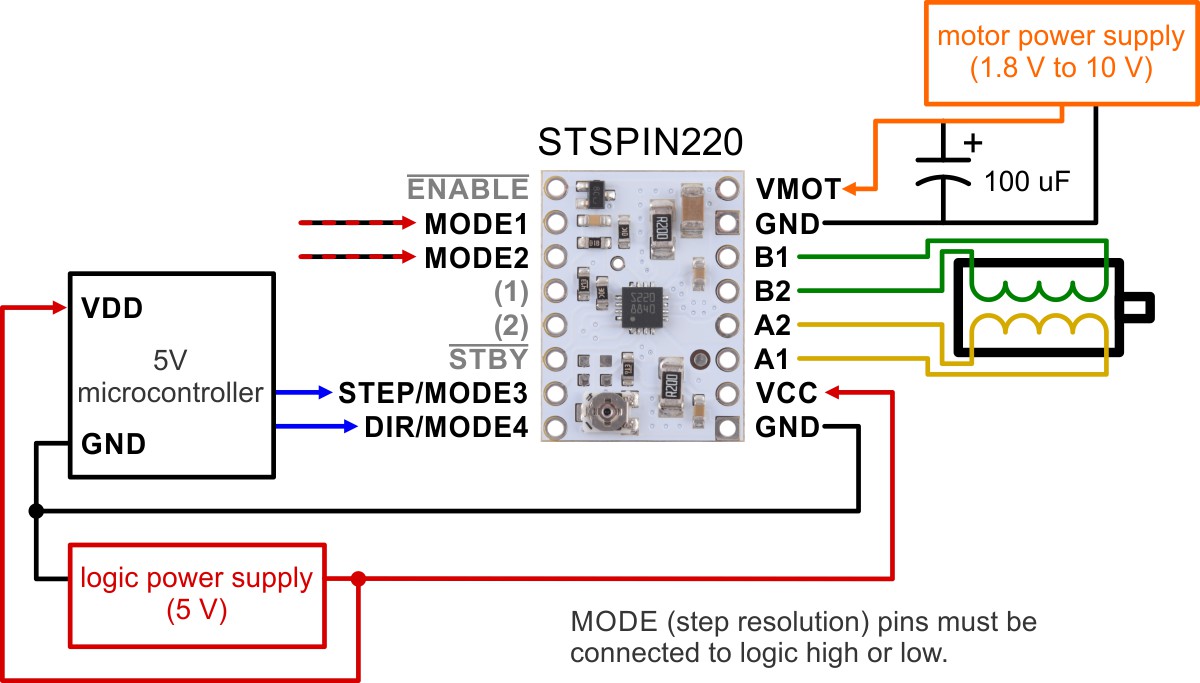
The controller requires connection oflogical voltage (from 3 to 5 V)through VCC and GND outputs andmotor supplyvoltagefrom 1.8 Vto 10 V throughVIN and GND outputs. The power supplies should have appropriate decoupling capacitors located close to the board and should be able to deliver the expected currents. The system has protections against overheating, short circuit and exceeding the maximum current.
The step size is selected using M0 - M4 inputs. The table below shows how to obtain the appropriate step resolution. The current limit must be set low enough for proper operation of the controller modes. Otherwise, the intermediate current levels will not be properly maintained and the motor will skip the microsteps.
| MODE1 | MODE2 | MODE3 (STEP) | MODE4 (DIR) | Resolution |
|---|---|---|---|---|
| Low | Low | Low | Low | Full step |
| High | Low | High | Low | Half step |
| Low | High | Low | High | 1/4 step |
| High | High | High | Low | 1/8th step |
| High | Low | High | High | 1/8th step |
| High | High | High | High | step 1/16 |
| Low | High | Low | Low | 1/32 step |
| Low | Low | Low | High | 1/32 step (1) |
| High | High | Low | High | 1 / 64 step |
| Low | High | High | High | 1/64th step |
| High | Low | Low | Low | 1/128 step |
| Low | Low | High | Low | 1/128 step (1) |
| High | High | Low | Low | 1/256 step |
| Low | High | High | Low | 1/256 step |
| High | Low | Low | High | 1/256 step |
| Low | Low | High | High | 1/256 step (1) |
(1) Maintaining low states on the inputs MODE1 and MODE2 after configuring the step resolution forces the controller to full step mode instead of the selected configuration.
STSPIN220 has 2 different inputs to control power, STBY /RESET and EN/FAULTstates:
STSPIN supports active pad limitation for high jumping speeds. One way to set the current limit is to set the controller to full step mode and measure the current flowing through a single motor coil without STEP input timing. The measured current will be equal to the current limit.
Current limit = VREF x 5
|
Attention! The coil current may be very different from the power supply current. When setting the current limit, use the current measured at the power supply. If the controller operates in full crow mode, both coils will always be on and limited to 100% of the current setting. If the controller operates in one of the microcontrol modes, the current flowing through the coils will change with each step from 0% to 100% of the set limit. |
Useful links |
| Voltage to | 1,8 V |
| Voltage from | 10 V |
| Current | 1,1 A |
| Channels | 1 |
| Niebezpieczne | Component |
| Package width | 8 cm |
| Package height | 0.5 cm |
| Package depth | 8.7 cm |
| Package weight | 0.003 kg |
Be the first to ask a question about this product!

Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin






