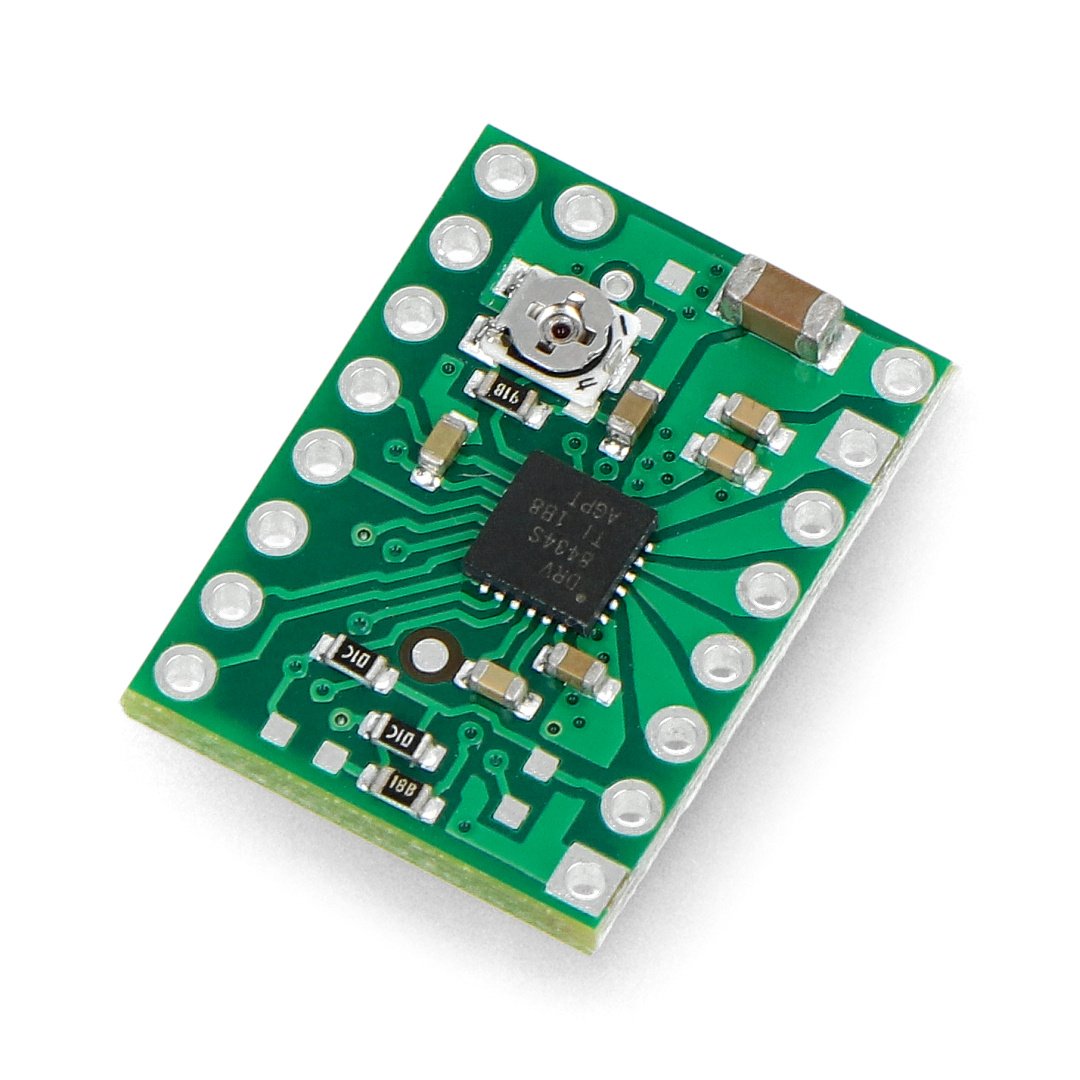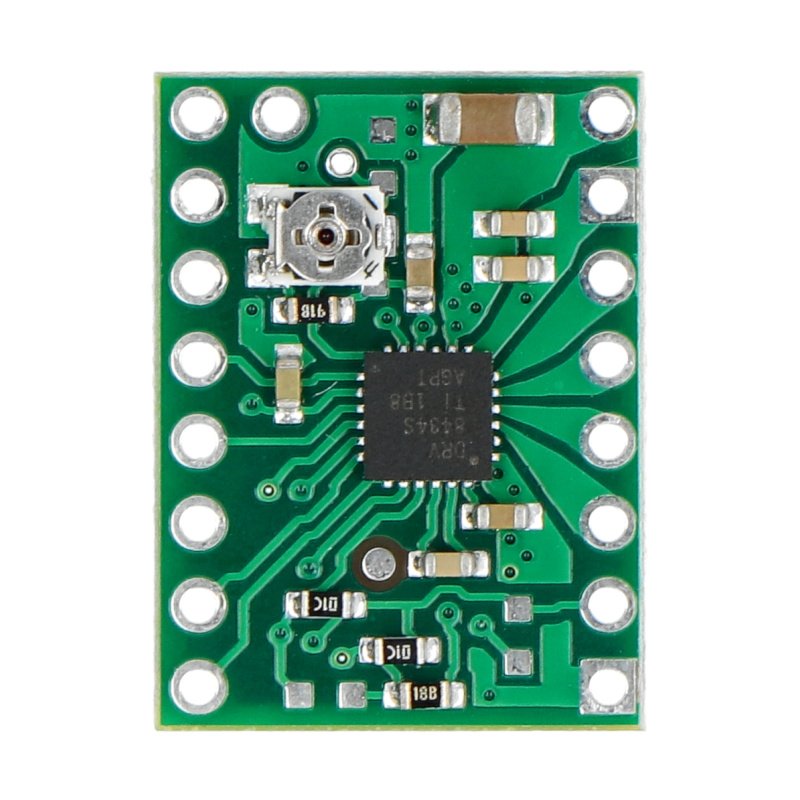




































































































































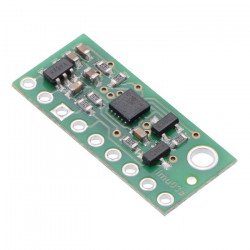



















































































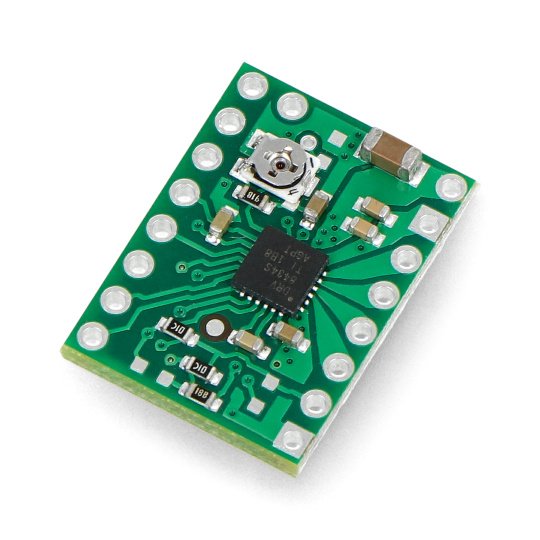
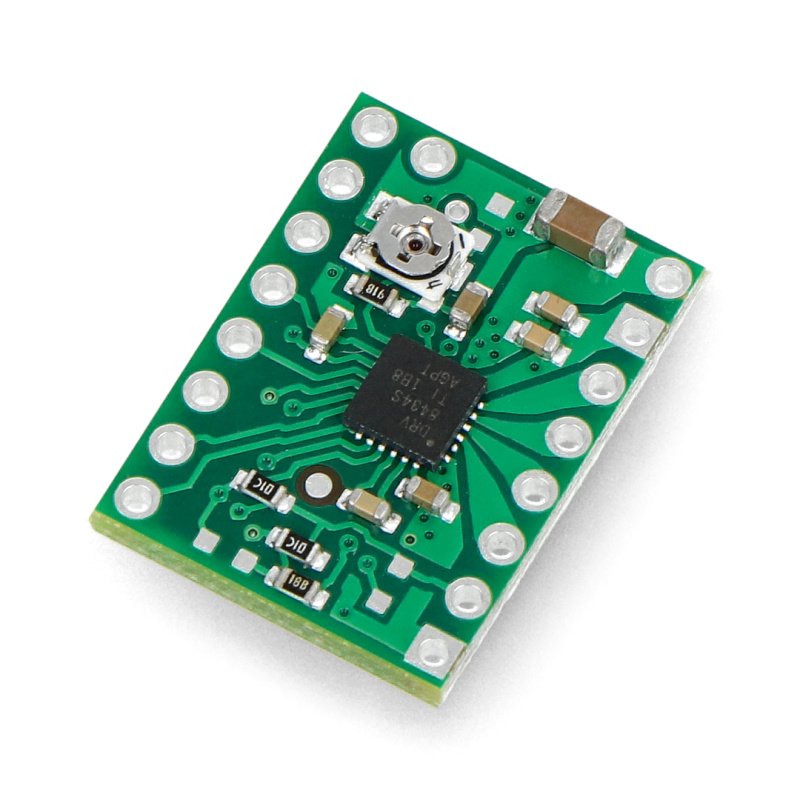




Stepper motor driver module based on the DRV8434S chip from Texas Instruments. It is powered with the voltage in the range from 4.5 V to 48 V. It offers a wide range of step resolution - from full to 1/256 step . This version of the board uses a built-in potentiometer to set the maximum current limit, and the SPI interface can be used to set the actual current limit to any of 16 equally spaced values from 125mA to 2A . The module has protection against overheating, short circuit and exceeding the maximum current.
Our offer also includes drivers for stepper motors with different operating parameters.
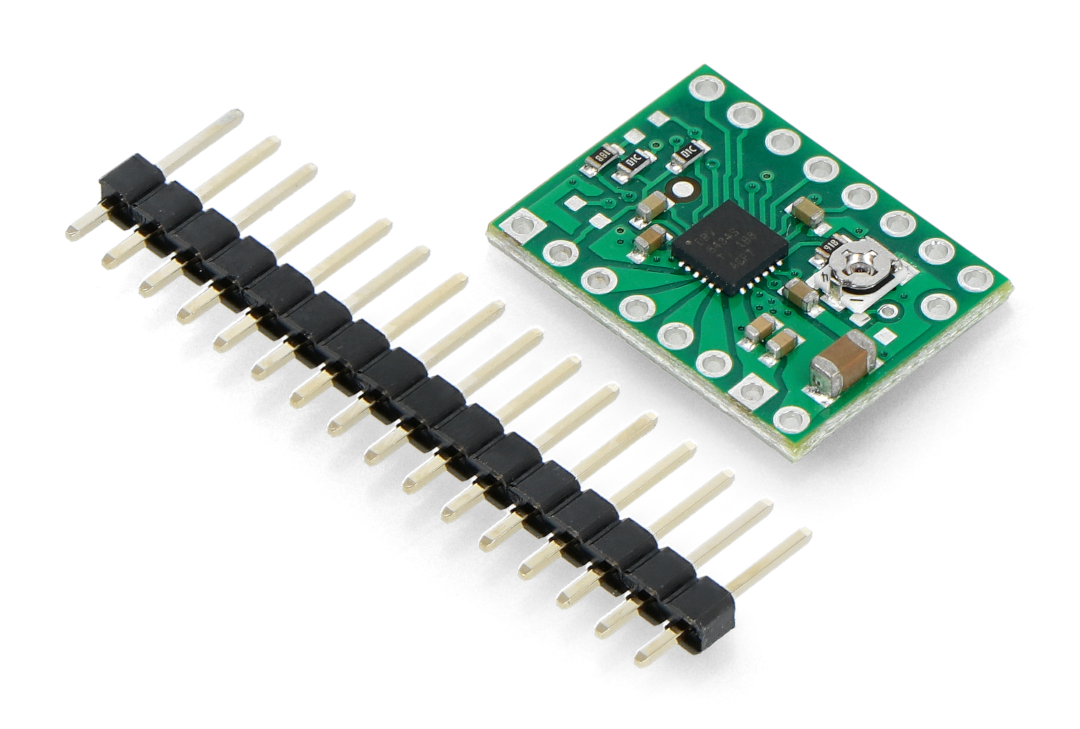 The set includes a goldpin strip.
The set includes a goldpin strip.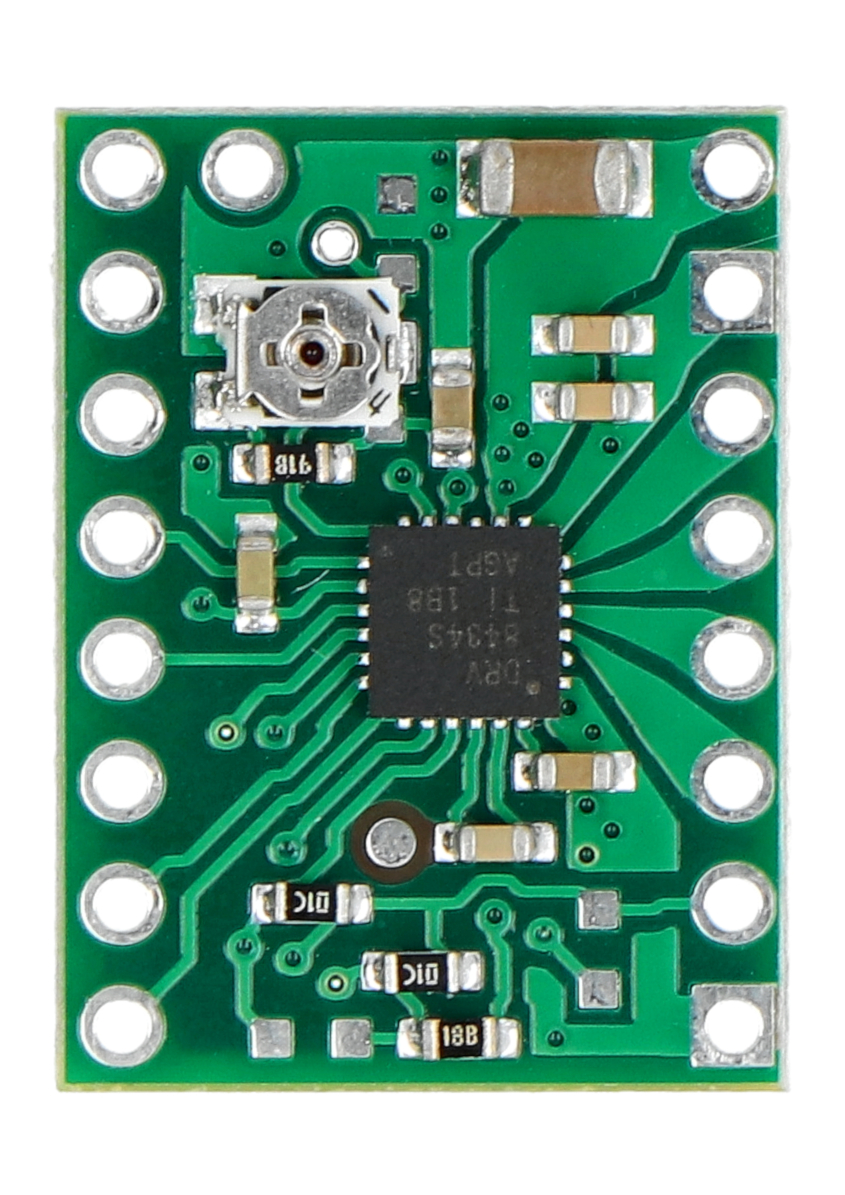
DRV8434S stepper motor driver 48 V / 2 A SPI with potentiometer.
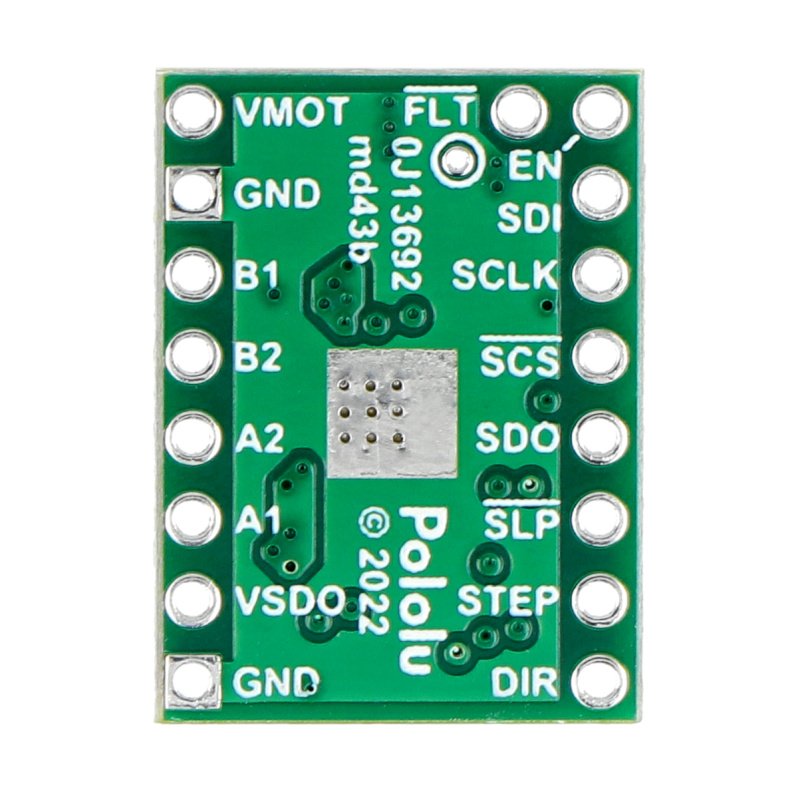
The controller requires a motor supply voltage of 4.5 V to 48 V, which must be connected via VIN and GND. Note that supply voltages below 6 V limit the maximum current limit that can be set. The VSDO pin must also be powered with the desired SPI logic voltage. The DRV8434S SPI interface is compatible with 1.8V, 3.3V and 5V systems.
One pulse given to the STEP pin corresponds to one step of the stepper motor in the direction given to the DIR pin. The STEP and DIR pins are internally pulled to ground (GND). Therefore, if the motor is only to rotate in one direction, DIR can be left unconnected.
The device has two different inputs for controlling power states: SLEEP (SLP) and ENABLE. SLP is connected to VSDO via a 10k pull-up resistor and ENABLE is internally pulled up by the driver. The pins can be left disconnected or dynamically controlled by connecting them to the digital output of the MCU.
The DRV8434S also has a FAULT (FLT) output. It goes low when it detects an abnormality in the system's operation. FAULT is pulled up to VSDO, so no external pull-up resistor is needed.
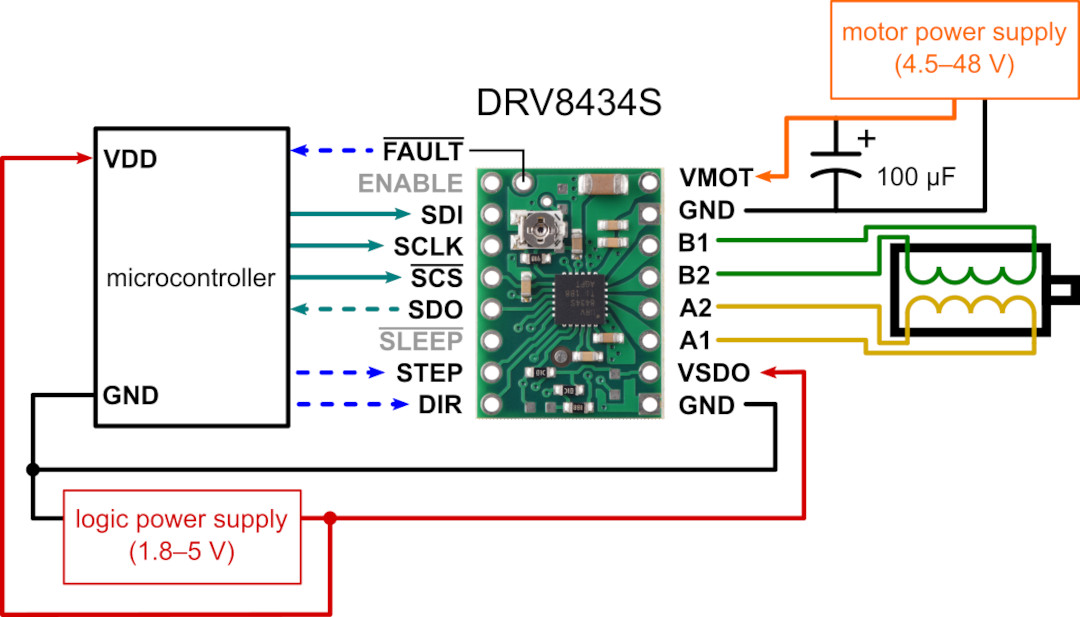
An example of connecting the microcontroller to the DRV8434S controller.
To achieve high stepping speeds, motor power is typically higher than would be acceptable without active current limiting. For example, a typical stepper motor might have a maximum current rating of 1A with a coil resistance of 5Ω, which would indicate a maximum power supply of 5V to the motor. Using such a motor at 9V would allow higher stepping speeds, but the current must be limited to less than 1A to prevent engine damage.
This version has the maximum current limit fixed at 2A and the SPI can be used to set the actual current limit to any of 16 equally spaced values from 125mA to 2A.
Another way is to measure the voltage on the VREF pin and calculate the current limit. The current limit can be calculated from the formula:
current limit = VREF/ 1.32
or
Effective current limit = VREF⋅TRQ_DAC_%/1.32
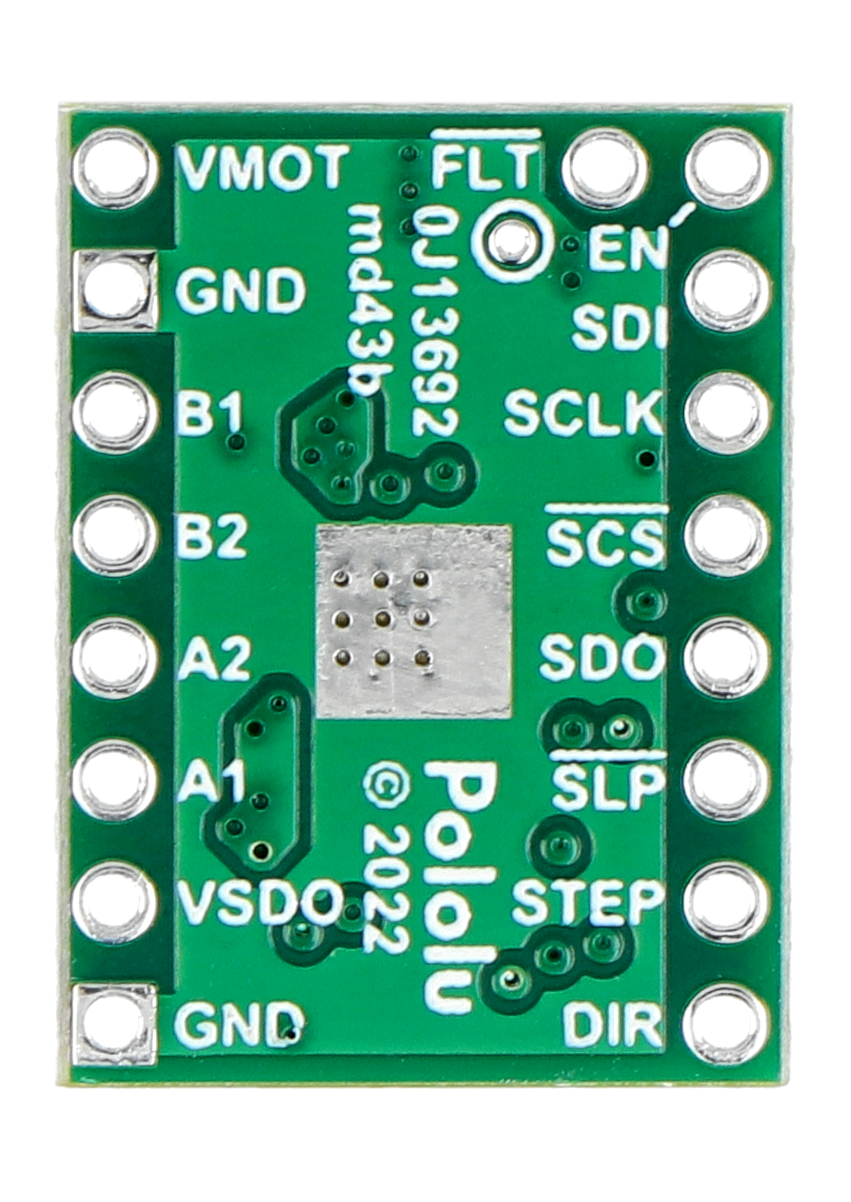
The module is based on the DRV8434S system by Texas Instruments.
| Package width | 8 cm |
| Package height | 9 cm |
| Package depth | 1 cm |
| Package weight | 0.003 kg |
Be the first to ask a question about this product!

Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin