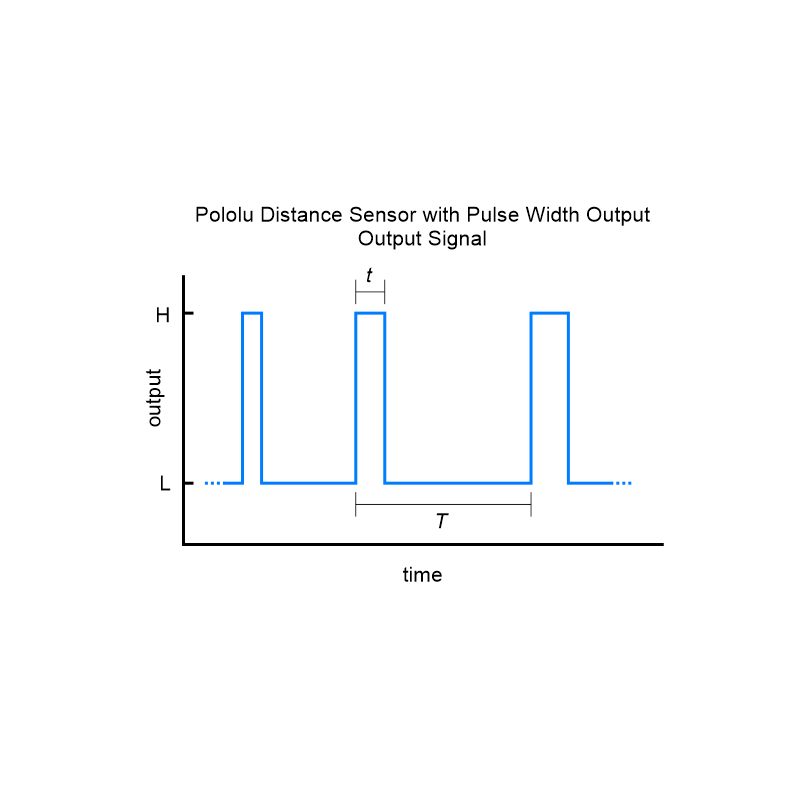










Adistancesensor board based onLidartechnology. The sensor detects objectsup to 130cm and is poweredfrom 3 V to 5.5 V. It is equipped with one digital PWM output whose signal is similar to the servo control signal. A digital microcontroller pin can be used to measure the duration of each high pulse, which encodes the measured distance. Short range Lidar technology is used toaccurately measurethe time it takes for the emitted pulses of eye-safe infrared light to reach the nearest object and be reflected back. As long as the sensor is operating, it takes continuous distance measurements and encodes the ranges as high pulse widths, which can then be synchronized by the microcontroller using a single digital input. A maximum range of 130 cm is only achievable for high reflectance targets in good environmental conditions. Targets with lower reflectivity or poor environmental conditions reduce the maximum range.
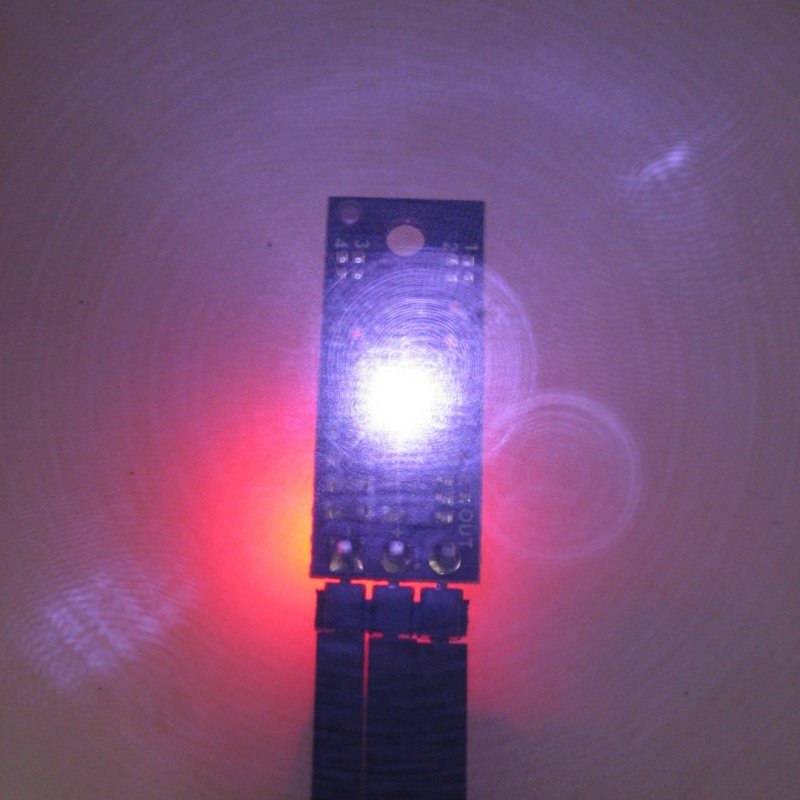
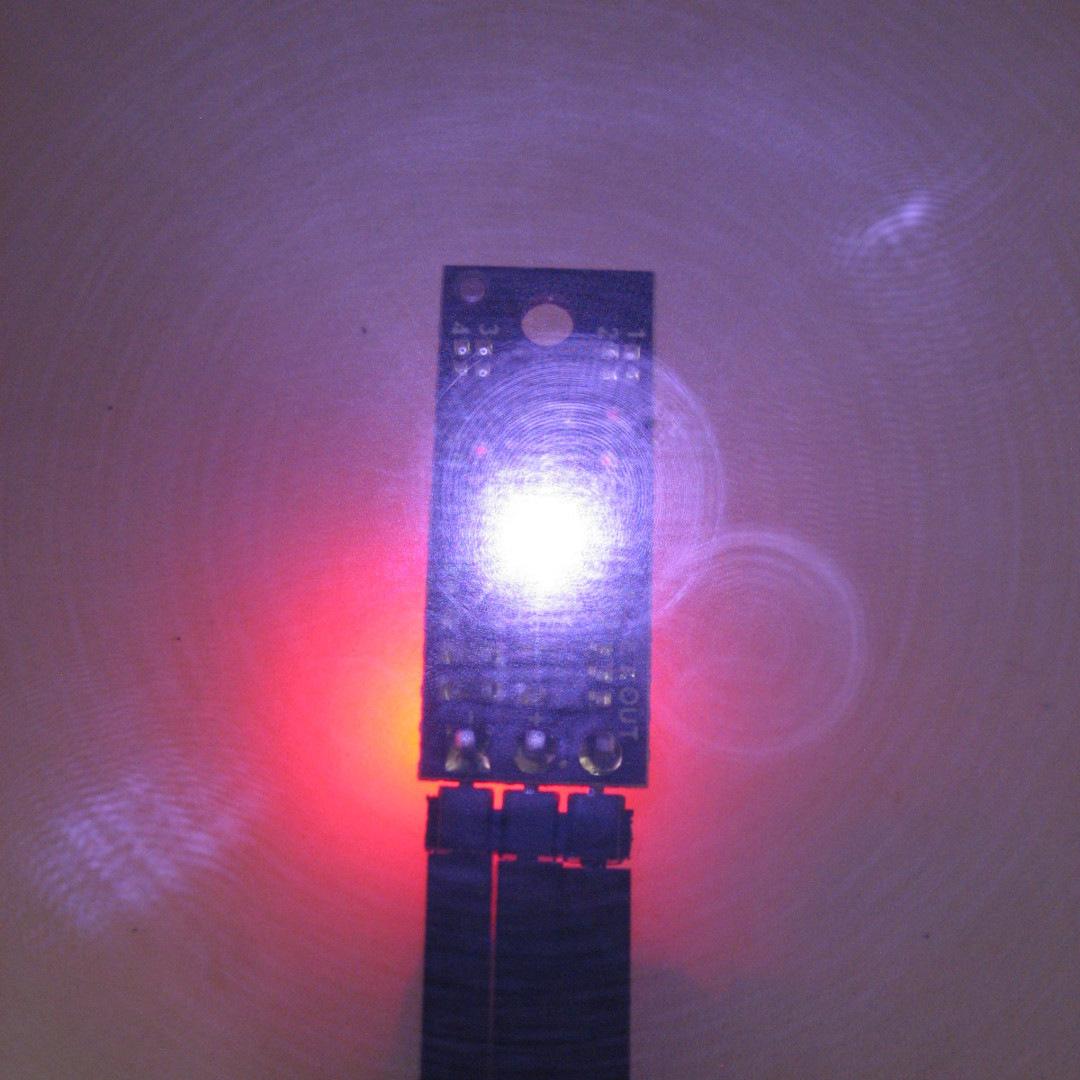 Infrared light emitted by the sensor, recorded with a camera without IR filter.
Infrared light emitted by the sensor, recorded with a camera without IR filter.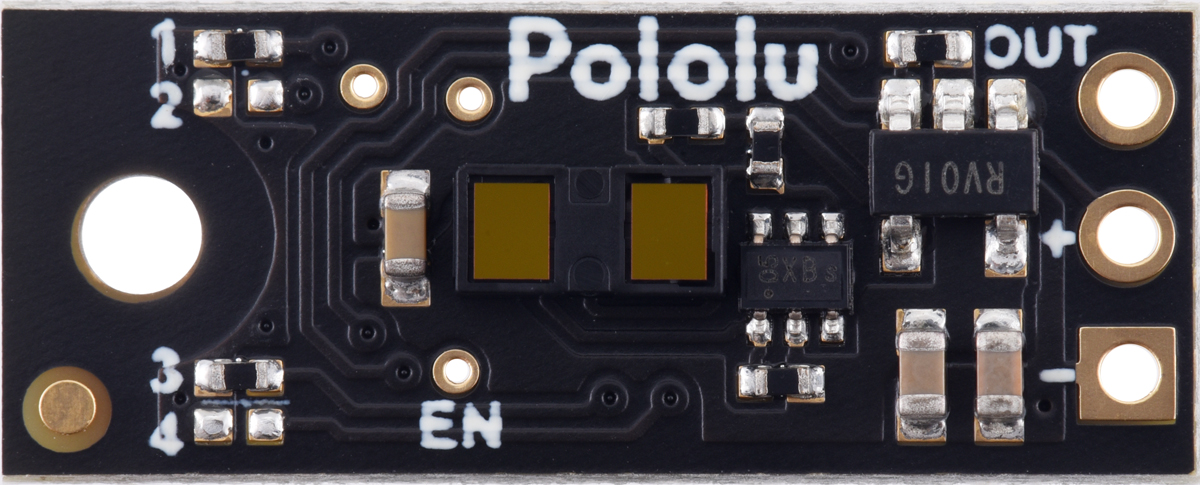 Digital distance sensor 130 cm.
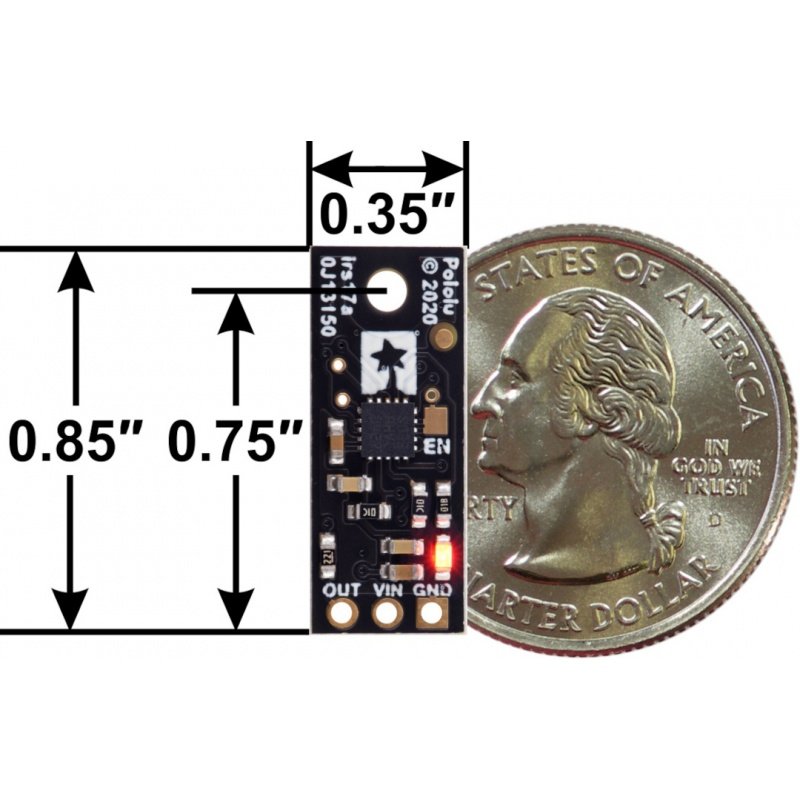
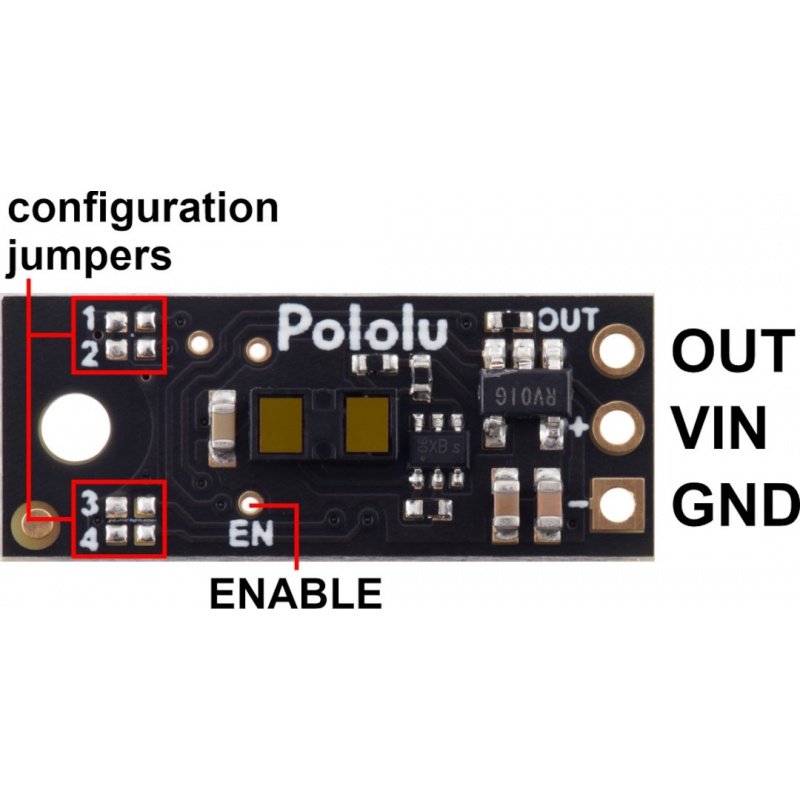
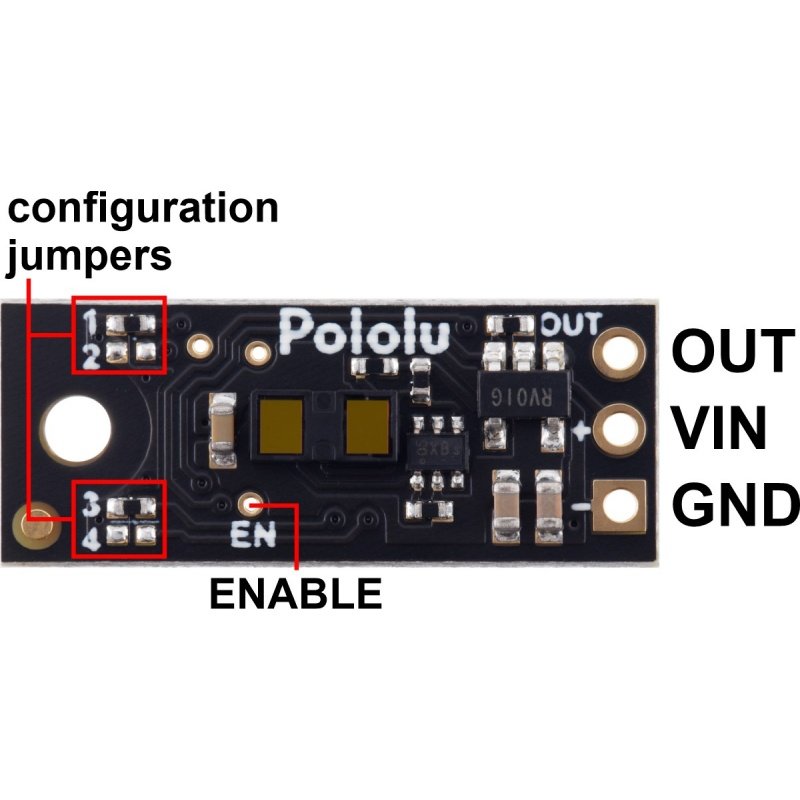
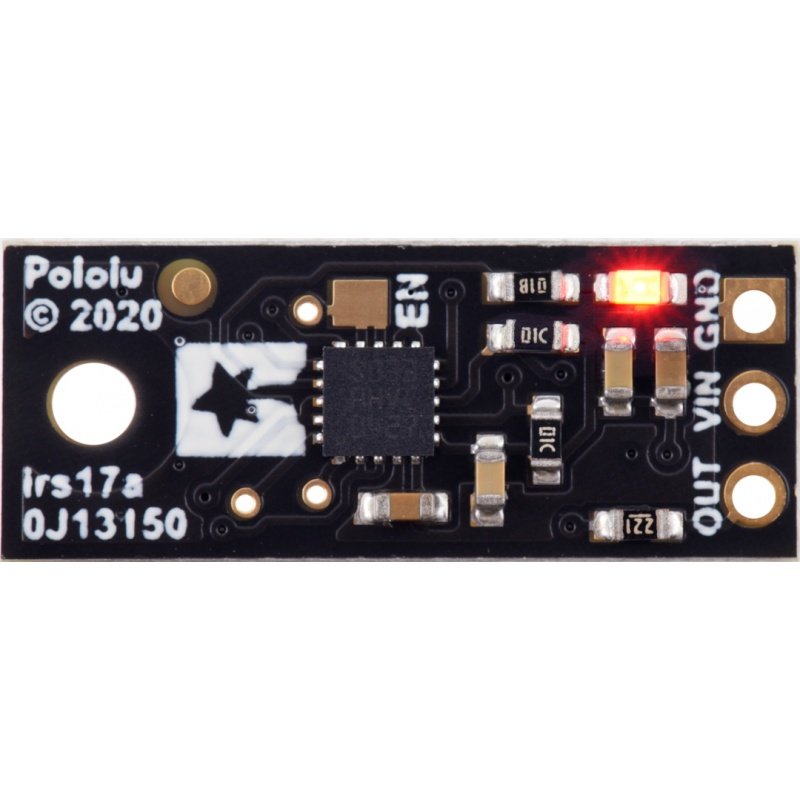
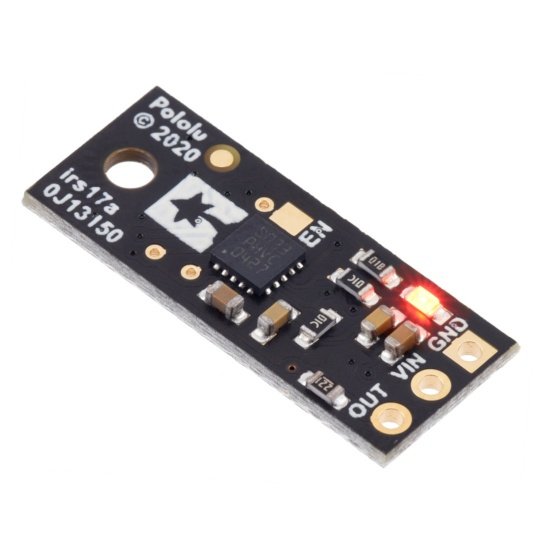
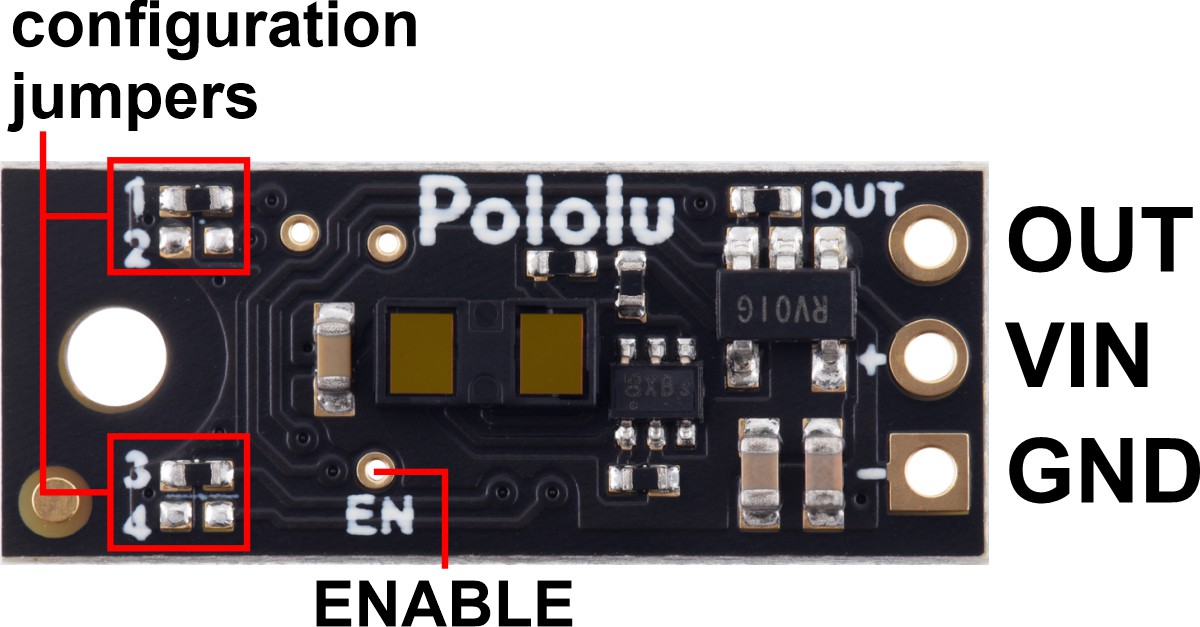
Digital distance sensor 130 cm.The module has 3 leads:VIN, GND and OUT,in the form of holes with a 2.54 mm raster, with solderablegoldpin connectors(not included). VIN pin is used to power the modulefrom 3V to 5.5V, GND is a ground pin (0V). Digital pulses are sent to OUT pin. The low level of the pulses is 0 V and the high level is the voltage value from VIN. AredLEDalso lights up when an object is detected, andit lights up brighter when the object is closer to the sensor.There is also an ENABLE pin on the board that can be set low to put it into a low power state, which consumes about 0.4 mA of current. The ENABLE pin is pulled up to VIN by default.
There is a protective film on the sensor that must be removed before working with the module.
The board contains four surface mount configuration jumpers (4321) that determine its operating modes. Different versions of Pololu sensors have the jumpers set appropriately as 0 Ω resistors. The resistors can be soldered out or bridges can be added to convert one version of the sensor into another. This sensor can be converted to any other version of irs17a according to the table below.
| Product | Description | Range max. | Hysteresis | Distribution | Minimum update frequency | Jumper settings (4321) |
|---|---|---|---|---|---|---|
| #4066 | Digital output, 25 cm | 25 cm | 50 mm | - | 100 Hz | 0000 |
| #4067 | Digital output, 50 cm | 50 cm | 50 mm | - | 100 Hz | 0001 |
| Digital output, 75 cm | 75 cm | 50 mm | - | 100 Hz | 0010 | |
| #4069 | Digital output, 100 cm | 100 cm | 50 mm | - | 100 Hz | 0011 |
| Digital output, any detection | ~130 cm | - | - | 100 Hz | 0010 | |
| #4071 | PWM output, max. 130 cm | ~130 cm | - | 1 mm (- 0.5 µs) | 100 Hz (max. 110 Hz) | 0101 |
| Digital output, 125 cm | 125 cm | 50 mm | - | 30 Hz | 1000 | |
| Digital output, 150 cm | 150 cm | 50 mm | - | 30 Hz | 1001 | |
| Digital output, 175 cm | 175 cm | 50 mm | - | 30 Hz | 1010 | |
| #4077 | Digital output, 200 cm | 200 cm | 50 mm | - | 30 Hz | 1011 |
| Digital output, any detection | ~300 cm | - | - | 30 Hz | 1100 | |
| #4079 | PWM output, max. 300 cm | ~300 cm | - | 2 mm (= 0.5 µs) | 30 Hz (max. 33 Hz) | 1101 |
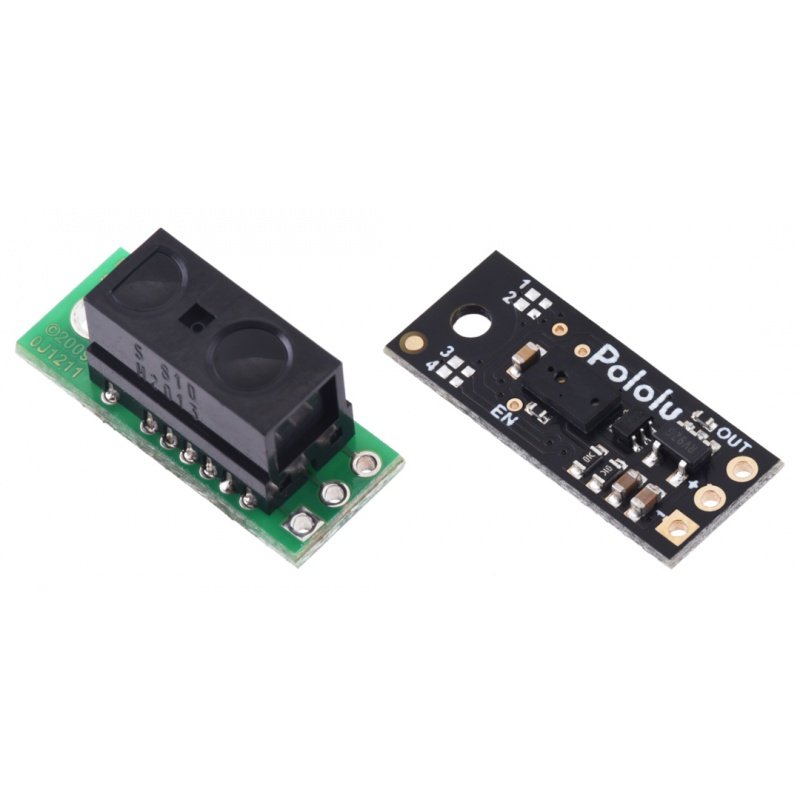
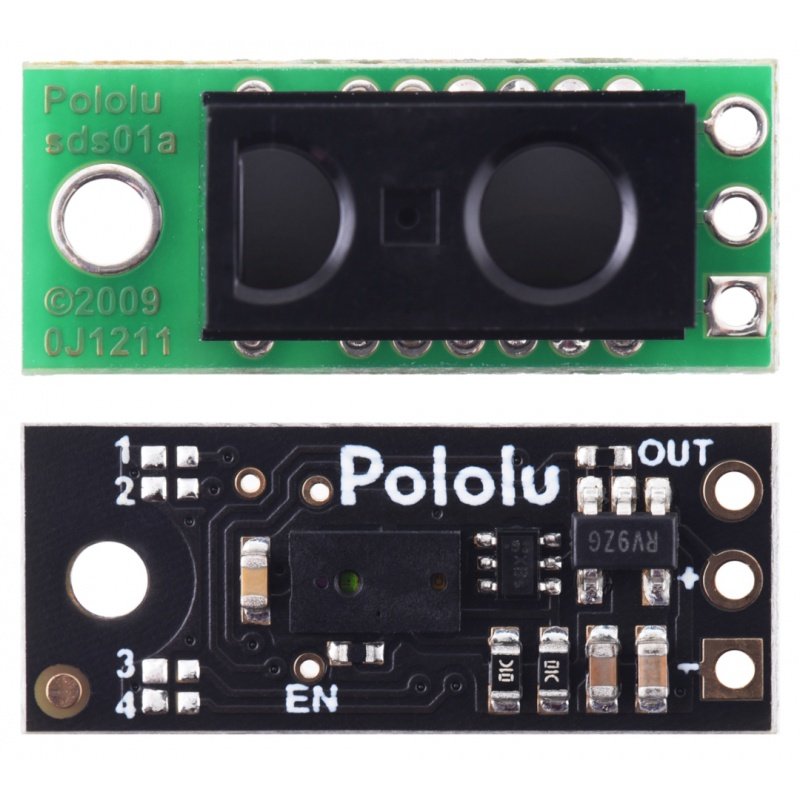
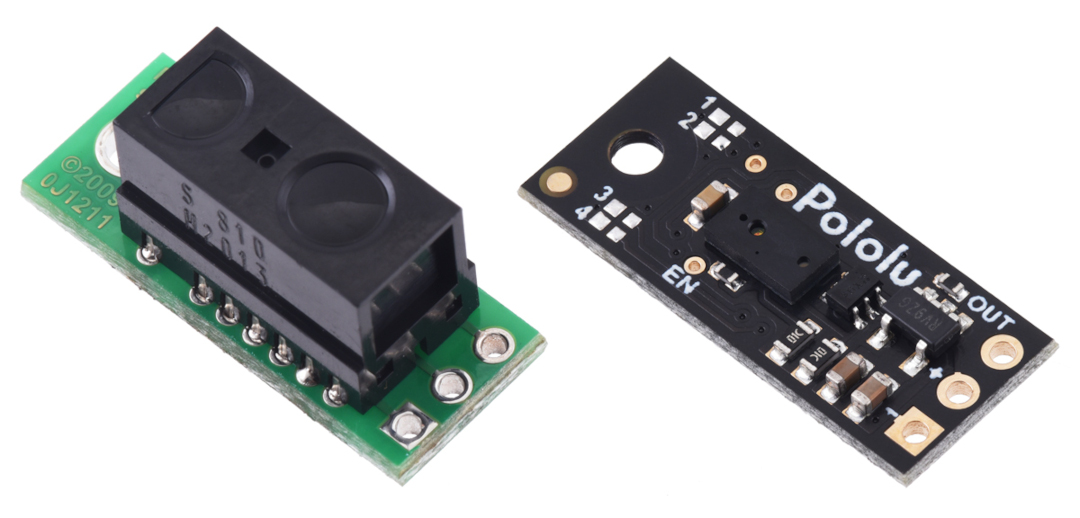 Comparison of Pololu and Sharp sensors.
Comparison of Pololu and Sharp sensors.The Pololu sensor modules have the sameshape and pin-outsasthe Sharp modules. They are available with the same and larger sensing ranges, which means that they can be usedinterchangeably. The sensors on the newer Pololu devices aremuch thinnerthan the Sharp modules, so the zero point is about 7mm closer to the board, and the beam angle on the newer devices is wider.
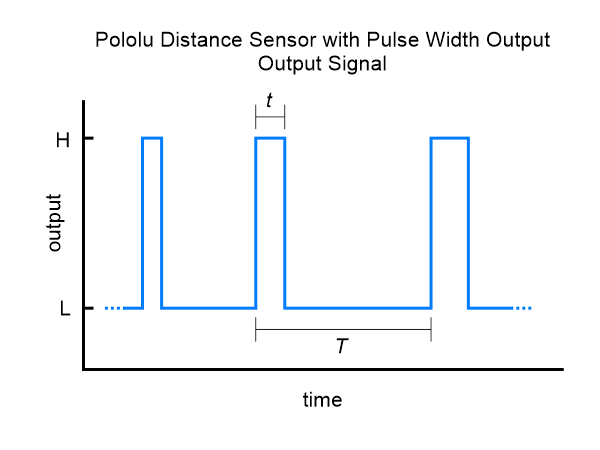 Output signal diagram.
Output signal diagram.| Voltage to | 3.0 V |
| Voltage from | 5.5 V |
| Interface | Digital I / O |
| Sensor - distance to | 130 cm |
| Sensor - distance from | 0.1 cm |
| Niebezpieczne | Component |
| Package width | 7.8 cm |
| Package height | 8.6 cm |
| Package depth | 0.2 cm |
| Package weight | 0.001 kg |
Be the first to ask a question about this product!
Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin