















































































































































































































































































































































- Reduced price
- Sale




- Reduced price
- Sale


- Reduced price
- Sale



- New
- Reduced price
- Sale


ROBOTS AND MECHANICS - Strona 7





Loading...

Servo Feetech FS5113R - standard - continuous 360 degrees
Standard servo. The power voltage from 4.8 V to 6 V. Operates in the range from 0 to 360 degrees - continuous rotation. Speed: 0.16 s/60°. Torque: 14 kgf*cm...
Index: FTC-09174
Index: FTC-09174
- Reduced price
- SPECIAL OFFERS

Micro motor N20-BT39 1000:1 14RPM - 9V
The N20 series miniature motor with 1000:1 gearing, has 14 RPM, torque is equal to 5 kg*cm (0.49 Nm). The supply voltage is from 3V to 9V.
Index: DNG-12600
Index: DNG-12600

90x10mm Wheels - blue - Pololu 1438
Set of plastic wheels (2 pcs) with rubber tyres for high grip. Suitable for engines with Pololu gearboxes.
Index: PLL-10890
Index: PLL-10890

Vibration Motor 10 x 3,4 mm - Pololu 1636
Small motor generating vibrations of 0.75g amplitude. It consumes about 60mA of current when powered by 3 V.
Index: PLL-00589
Index: PLL-00589

Brushless Motor with Gear 25Dx43L 45:1 with PWM driver + encoder
Brushless motor with 45:1, 159 rpm, 2.4 kg*cm (0.23 Nm) gearing. The device has a built-in controller with PWM and DIR input, so no additional controller is required. The...
Index: DFR-05188
Index: DFR-05188

Unipolar stepper motor, six wire. It has a resolution of 200 steps per revolution (1.8 degrees). It is powered by 6 V and draws 800 mA current per coil. The torque is 3.17...
Index: MOT-06426
Index: MOT-06426

HP Motor with 75:1 Gear - Pololu 2361
A miniature high-power motor by Pololu with a gearbox of 75: 1, has 400 rpm, the torque is 1.6 kg * cm (0.156 Nm).
Index: PLL-00722
Index: PLL-00722

37Dx54L Motor with 50:1 Gear 12V 200RPM - Pololu 4743
Polol's engine with a 50:1 gearbox. Its torque is 21 kg*cm and its speed is 200 rpm . The product is powered by 12 V and its current consumption is about 200 mA...
Index: PLL-16395
Index: PLL-16395
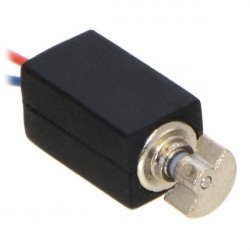
Vibration Motor 11,6x4,6x4,8mm - Pololu 2265
Vibration motor with displaced mass placed on the shaft. It draws approximately 60 mA of current with a 3 V supply.
Index: PLL-02037
Index: PLL-02037

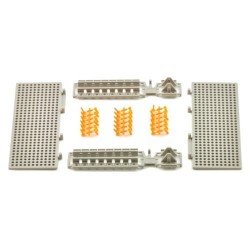
Profile V-Slot 2080 anodized silver 500mm
Aluminium constructional profile 2080, 500 mm long , in silver . Ideal for creating your own designs, the best examples are 3D printers, CNC milling machines or...
Index: VST-17331
Index: VST-17331

Stepper Motor JK42HS48-1204 200 steps 3,6V/1,2A/0,47Nm
A bipolar stepper motor, four wired. It has a resolution of 200 steps per revolution (1.8 degree). It is supplied with the voltage of 3.6 V, it consumes a current of 1200 mA...
Index: MOT-03613
Index: MOT-03613

Hexagonal Wheel Adapter - 12mm/3mm - 2pcs. - Pololu 2682
Aluminum adapter converting the 12 mm, hexagonal shaft suitable for different wheels, for 3 mm motor's shaft. The length of the adapter is equal to 17 mm.
Index: PLL-06091
Index: PLL-06091

Micro motor N20-BT25 50:1 630RPM - 9V
The N20 series miniature motor with 50:1 gearing, has 630 RPM , torque is equal to 1.1 kg*cm (0.107 Nm) . The supply voltage is from 3V to 9V .
Index: DNG-12567
Index: DNG-12567

Linear Actuator LA10 150N 40mm/s 12V - stroke 30cm
Linear actuator supplied with 12 V. The maximum lifting capacity of the actuator is 15 kg ( 150 N). The operating speed is 40 mm/sec. The device has a protection class of...
Index: WLS-17097
Index: WLS-17097
- Reduced price
- SPECIAL OFFERS

42x19mm Wheels - 2pcs. - Pololu 1090
The set includes a pair of Pololu wheels (2 pieces) in the size 42 x 19 mm.
Index: PLL-00521
Index: PLL-00521

Micro motor N20-BT41 100:1 150RPM - 6V
The N20 series miniature motor with 100:1 gearing, has 150 RPM, torque is 0.3 kg*cm (0.029 Nm). The supply voltage is 6 volts.
Index: DNG-12603
Index: DNG-12603

Servo type micro. The power voltage from 4.8 V to 6 V.
Speed: 0,09 sec/60°.
Torque: 0.6 kg*cm
Dimensions: 20.0 x 8.3 x 17.3 mm
Weight: 3.7 g
Index: FTC-09156
Index: FTC-09156

Stepper Motor SY28STH45-0674A 200 steps 4,5V / 0,67A / 0,095Nm - Pololu 1206
Bipolar stepper motor 200 steps (1.8 °) 4.5 V with 670 mA current per coil, 0.95 kg*cm (0.095 Nm) torque. Dimensions: 28 x 28 x 45 mm (NEMA 11).
Index: PLL-00469
Index: PLL-00469
Rubber V-belt - 2x90mm -10pcs.
Rubber belt used to transfer the drive e.g. from the motor shaft to another module, the thickness of the belt is 2 mm, the diameter is 90 mm. The set contains 10 pcs of belts.
Index: GRL-12513
Index: GRL-12513

90x10mm Wheels - black - Pololu 1435
Set of two plastic wheels with rubber tires for high traction. Compatible with Pololu geared motors.
Index: PLL-00454
Index: PLL-00454

Wheel 32x7 mm - white - 2 pieces - Pololu 1088
Set of plastic wheels (2 PCs.) with rubber tyres, providing a high adhesion. Suitable for engines with Pololu gears.
Index: PLL-00031
Index: PLL-00031

Stepper Motor 42BYGHM809 400 steps 3V 1,7A 0,48Nm - SparkFun ROB-10846
Bipolar stepper motor, four-wire. It has a resolution of 400 steps per revolution (0.9 degrees) . It is powered by 3 V and draws 1.7 A per coil. Holding torque is 4.89 kg*cm...
Index: SPF-02113
Index: SPF-02113

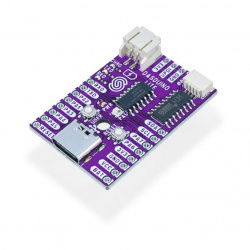
DFRobot Gravity - wired pump - peristaltic
Module connecting the PPM motor driver with a peristaltic pump. The control signal is compatible with a signal controlling the servos that can be used with different boards,...
Index: DFR-11460
Index: DFR-11460

Turbo Metal Gear Worm Motor (6V 40RPM 10kg/cm)
Metal worm gear motor for strength and high torque of 10 kg*cm (1 Nm). Supply voltage is 6V and speed is 40 rpm.
Index: DFR-06938
Index: DFR-06938