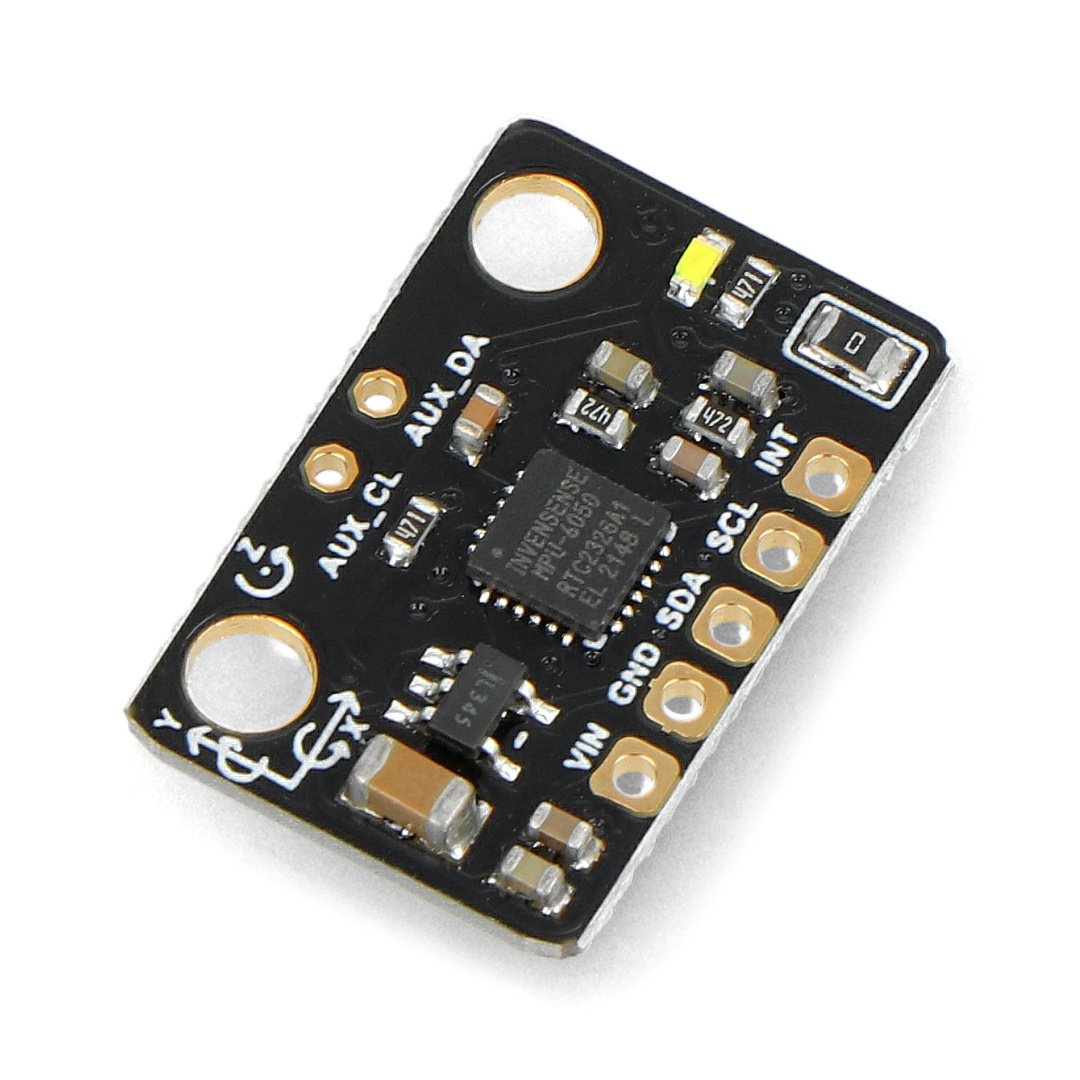























































































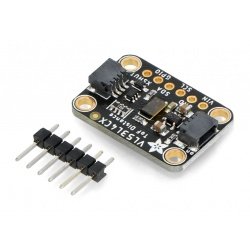

























































































































Sensor for measuring acceleration and angular velocity in three axes. It is a combination of 3-axis accelerometer and gyroscope. It is characterized by simple operation, it communicates via the I2C bus and operates with voltages from 3 V to 5 V.
 Description
DescriptionModule, using a 3-axis accelerometer and gyroscope, can measure the acceleration and angular velocity in three-dimensional space. The system MPU has a hardware unit DMP (Digital Motion Processor) that allows recalculation of the data to the position relative to the Earth.
For communication with the central unit, the popular I2C bus (TWI) is used. The module has, necessary for the correct operation of the system, passive elements. Leads are popular goldpin connectors, for connecting the sensor viawiresor for connecting directly to breadboard.
|
The product is compatible with Arduino The manufacturer provides alibrary for the Arduinoand a detaileduser manual. |
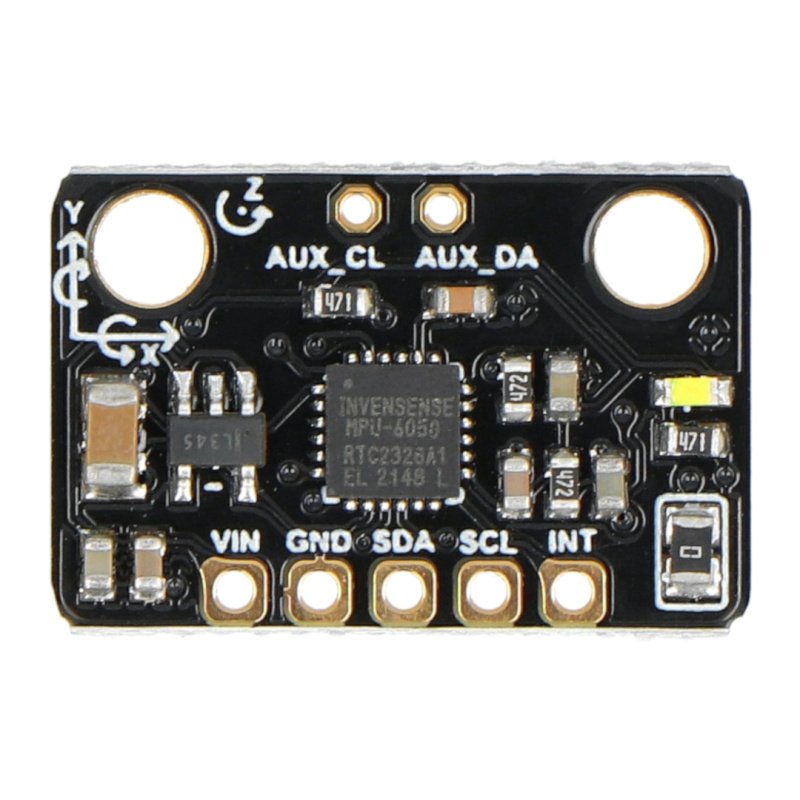
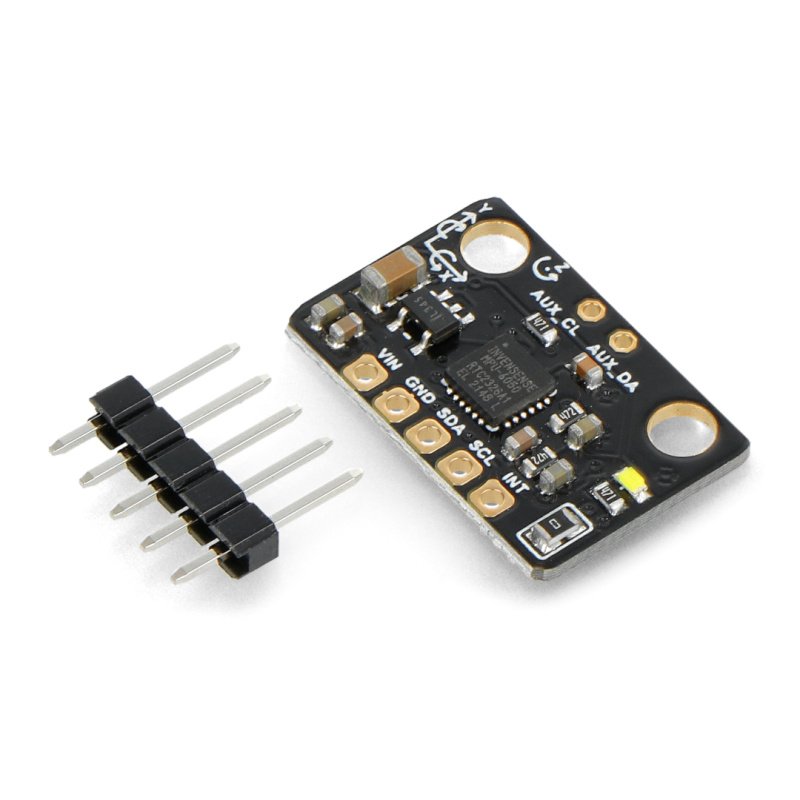
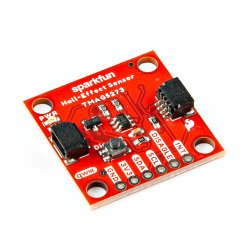
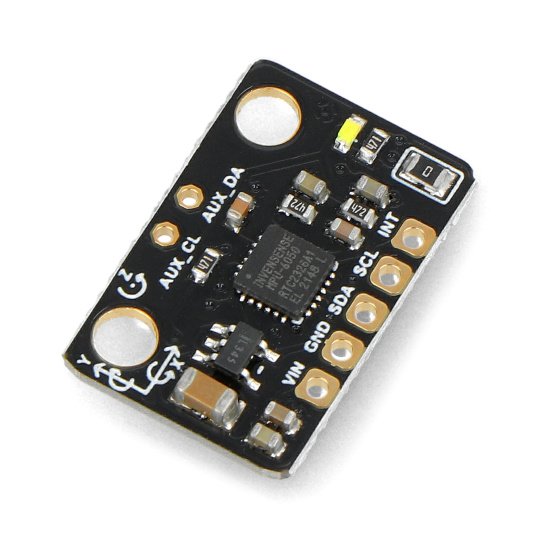
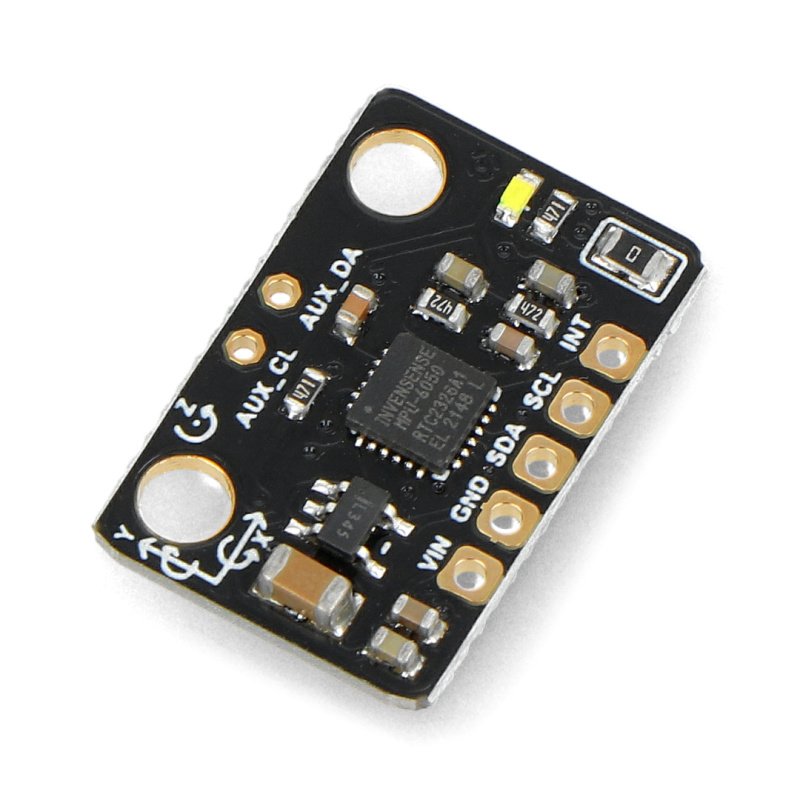
The sensor has four main leads for the installation of the goldpin connectors - 2.54 mm pitch (strip is included in the set for self-Assembly).

| Name | Description |
|---|---|
| VIN | Supply voltage from 3.0 V to 5.0 V. |
| GND | The mass of the system. |
| INT | The output of theexternal interruption - open drain (details in documentation) |
| SCL | Clock line of the I2C bus (TWI). |
| SDA | The data line of the I2C bus (TWI). |
| AUX_CL | Clock line of the I2C bus (TWI) for connecting an external magnetometer. |
| AUX_DA | The data line of the I2C bus (TWI) for connecting an external magnetometer. |
An example of a program for collecting measurement data from the sensor.
Useful links |
| Package width | 5.5 cm |
| Package height | 2.5 cm |
| Package depth | 6 cm |
| Package weight | 0.006 kg |
Be the first to ask a question about this product!

Country of Origin: China
Manufacturer Contact Details: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin