












































































































































































































































































Camera using Time of Flight technology, equipped with a MIPI-CSI2 connector and offering a measurement range of up to 4 meters with an accuracy of 2 cm. The resolution of the camera is 240 x 180 px , its viewing angle is 70° , and the image refresh rate is 120 fps . The module has been designed and optimized to work with Raspberry Pi and Nvidia Jetson minicomputers. Thanks to the ToF camera, it is possible to measure the distance to objects and create three-dimensional images in a simple way. It can work both indoors and outdoors, without the need for additional lighting.
The manufacturer has prepared a detailed user guide for the Time of Flight camera, check it out!

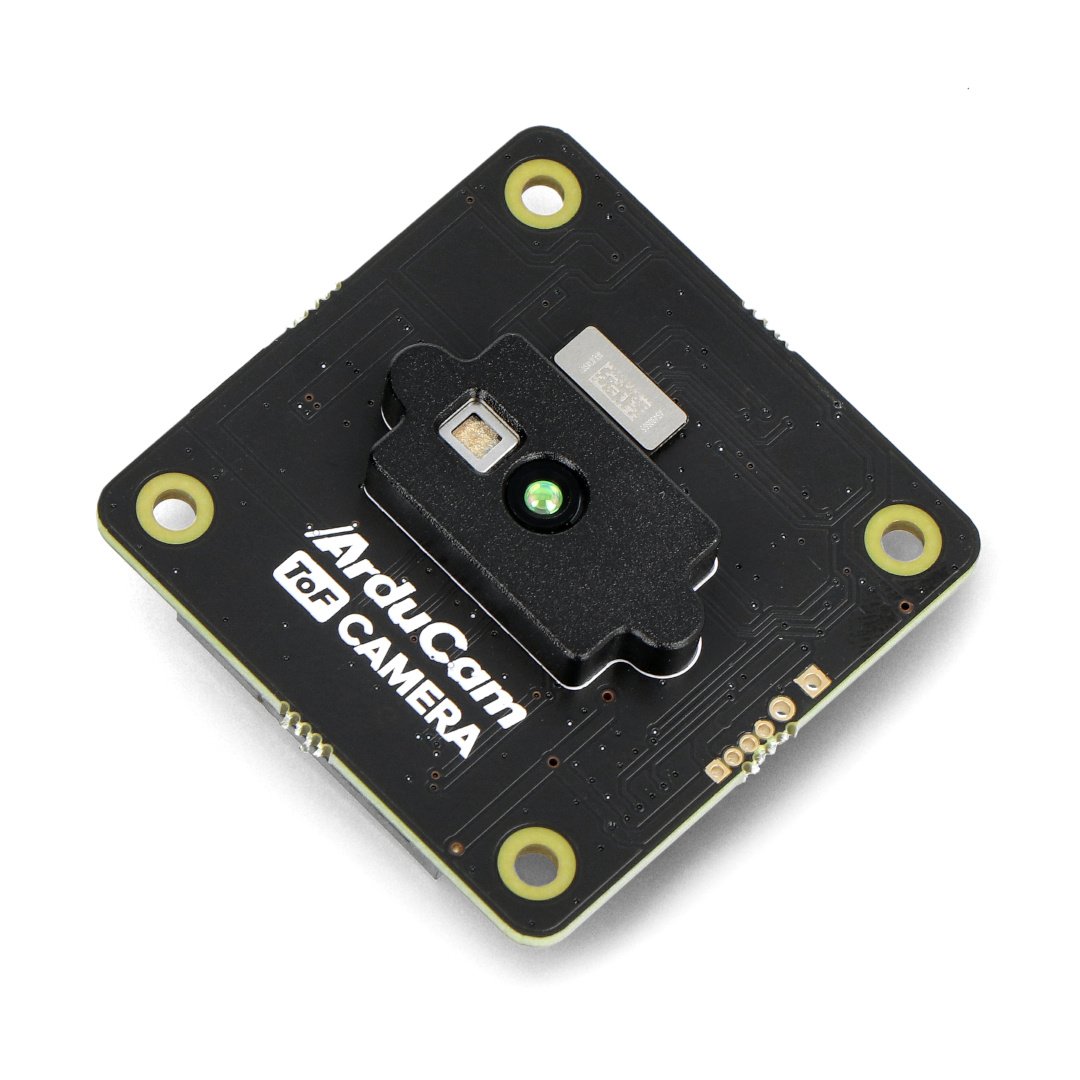
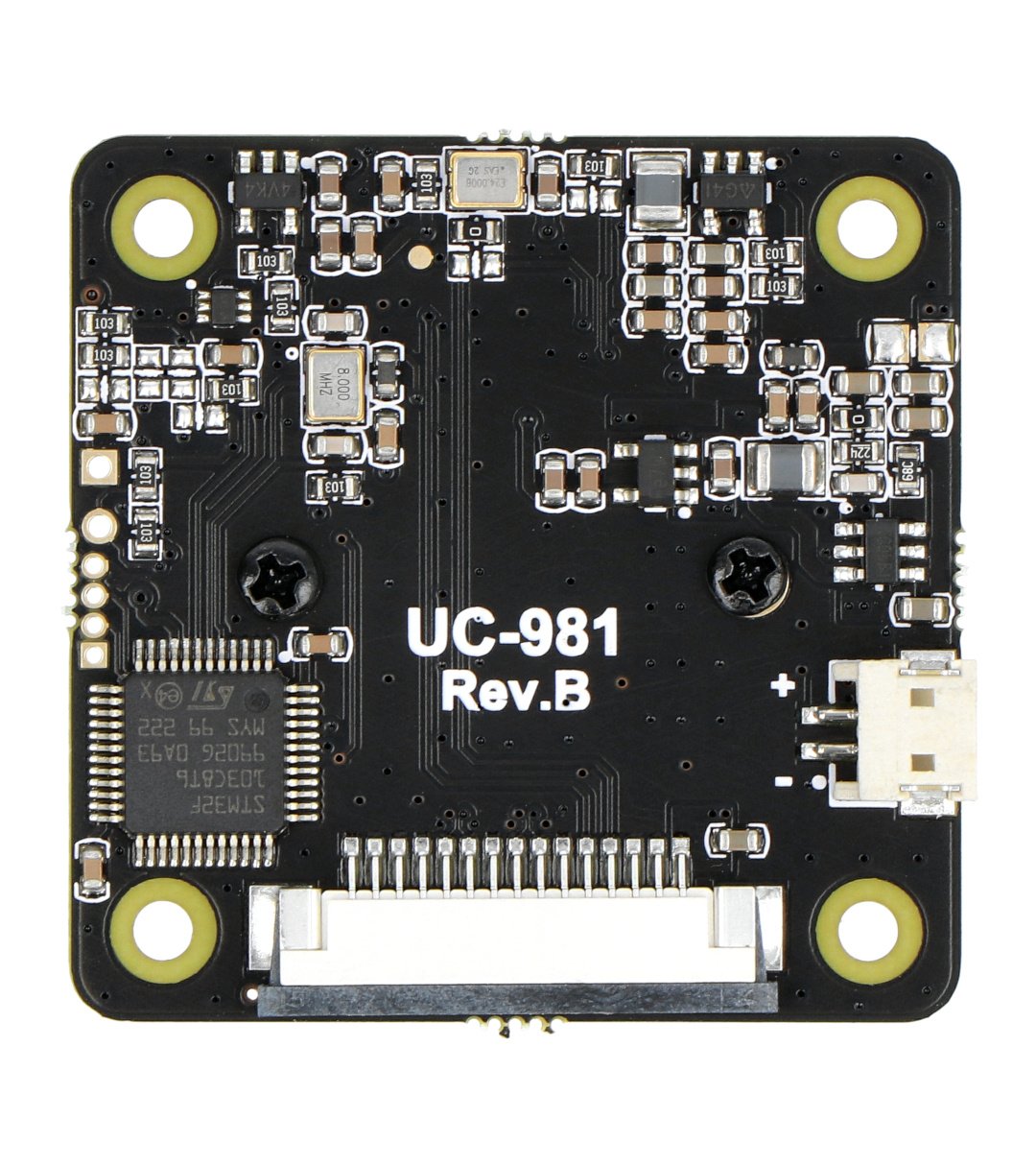
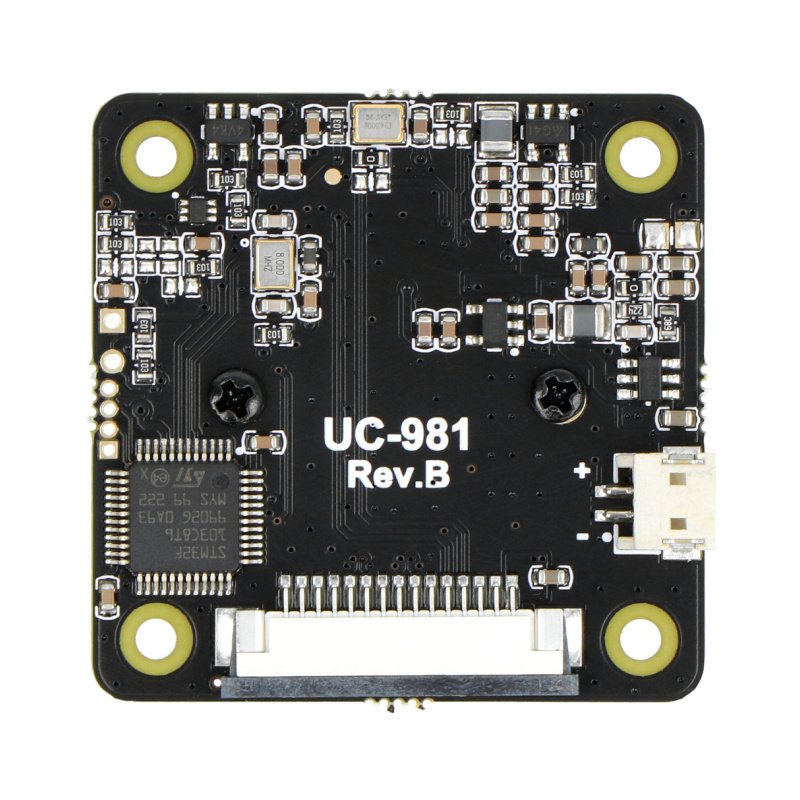
Time of Flight camera for Raspberry Pi - Arducam B0410.
The ToF camera from Arducam is a powerful computer vision tool that has been designed and optimized for each version of the Raspberry Pi minicomputer, thanks to a dedicated package prepared by the manufacturer. The camera module working with Raspberry Pi 4 / Compute Module 4 allows you to refresh at a speed of 30 fps (the sensor itself has a maximum refresh rate of 120 fps).
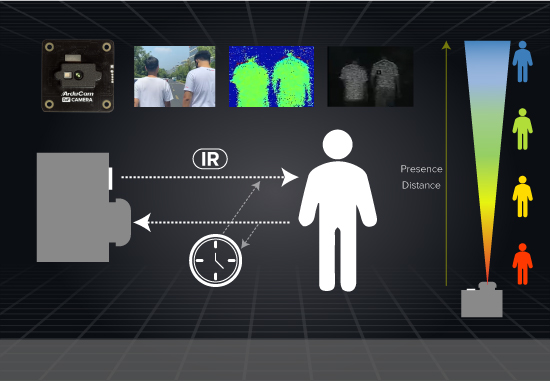
The ToF or Time of Flight camera emits modulated lights (CW method) and uses the time it takes for the emitted light to reflect back to get the distance/depth information of any object/scene and get the depth data (X,Y coordinate position , Z) in each pixel. The light path is calculated from the formula d=C/2f, where C is the speed of light and f is the modulation frequency.
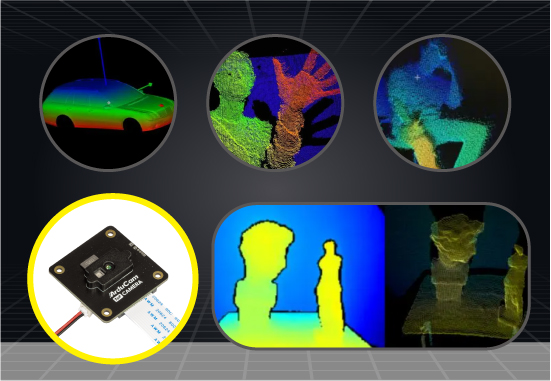
Using the Time of Flight camera with the Raspberry Pi, it is possible to map, create 3D imagery and photogrammetric applications that require points generated from 3D depth data captured by the ToF camera. They can easily be achieved in a low-power, Raspberry Pi-based system.
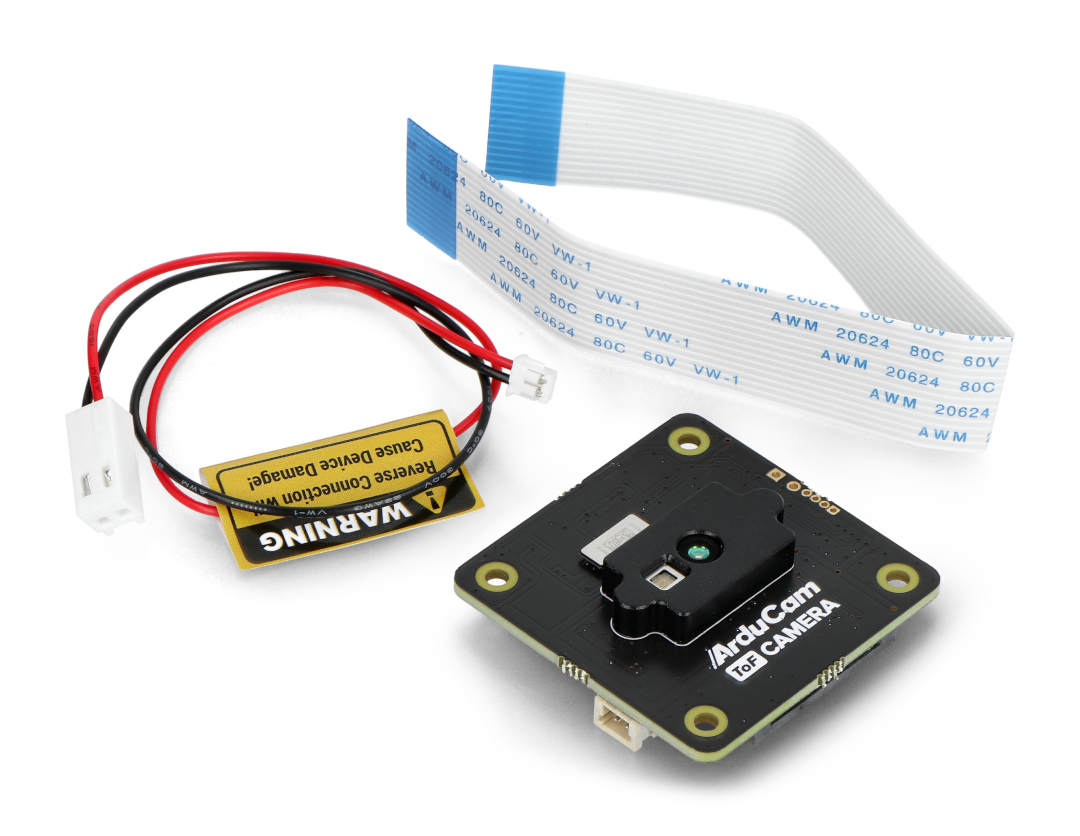 The contents of the ToF camera kit for Raspberry Pi.
The contents of the ToF camera kit for Raspberry Pi.
| Package width | 6 cm |
| Package height | 5 cm |
| Package depth | 1.5 cm |
| Package weight | 0.017 kg |
Be the first to ask a question about this product!

Country of Origin: China
Manufacturer Contact Details: Nanjing Paichi Electronics Technology co.,LTD RM#507, BLD#32, No.8 West Xianlin Shanhu Qixia District, Nanjing, China, 210046
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin