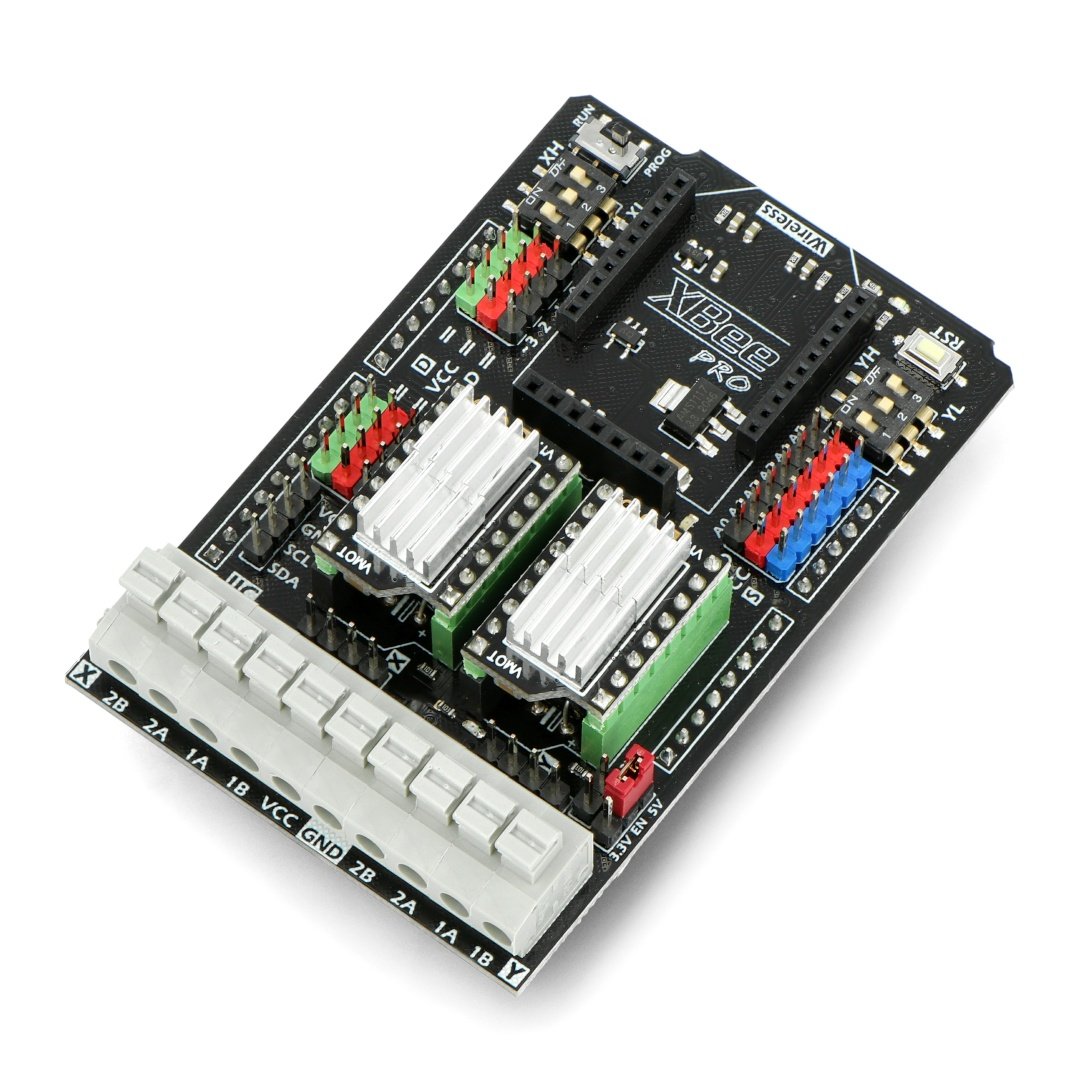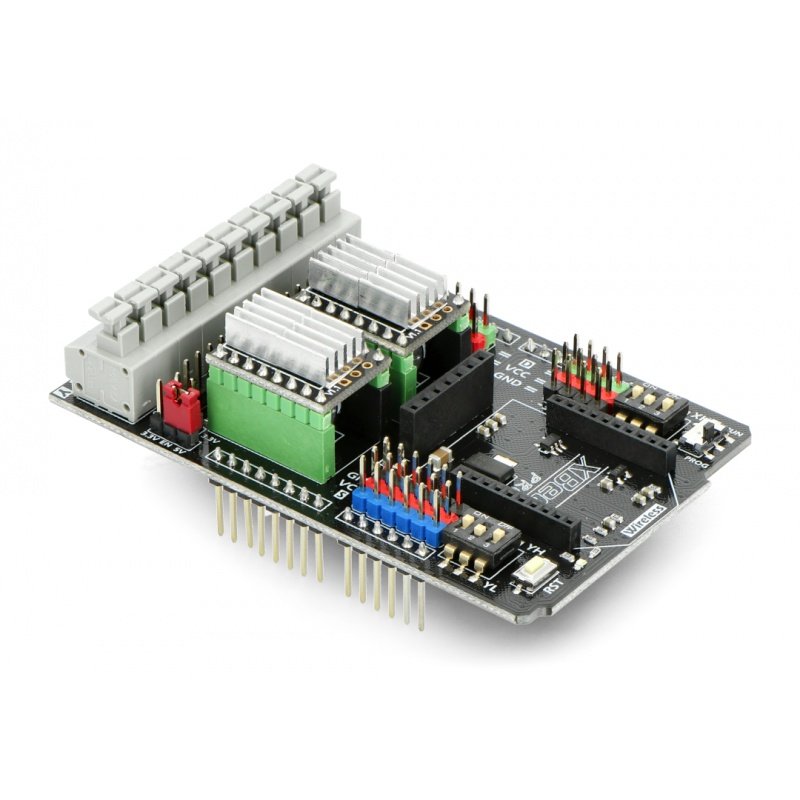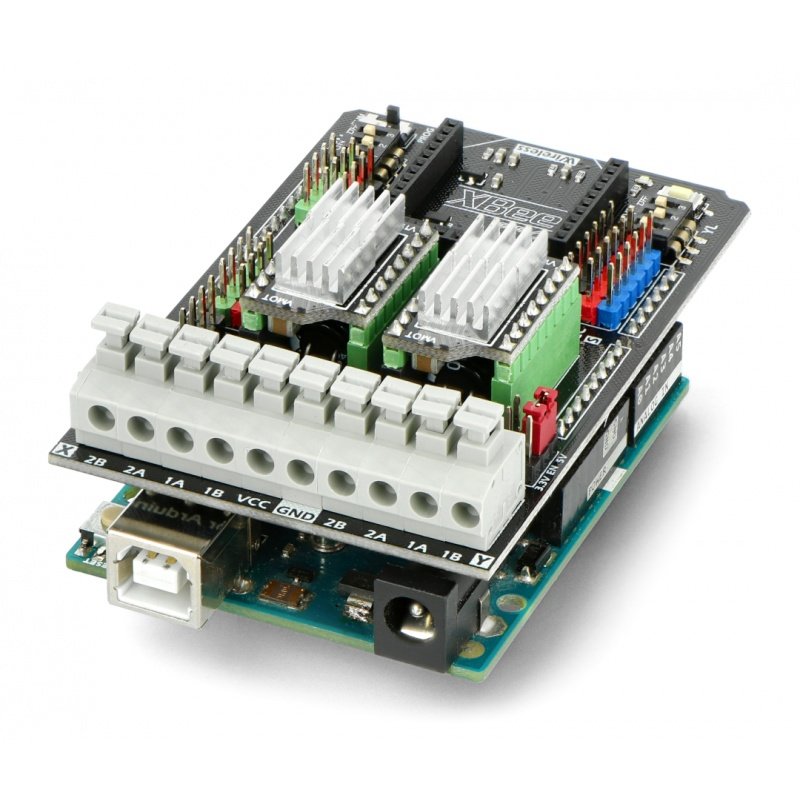
































































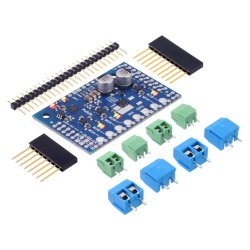









































































































































































































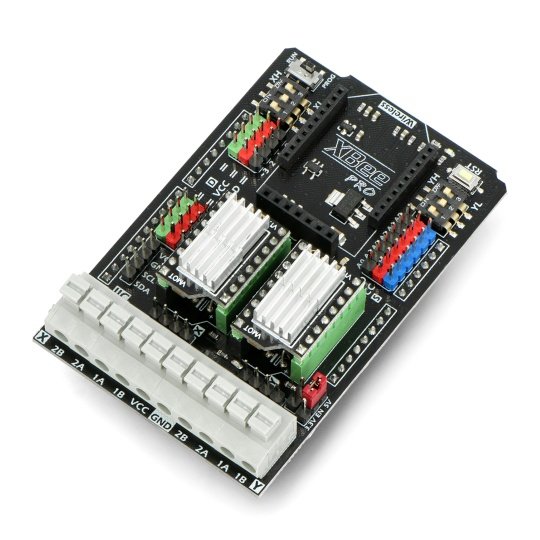
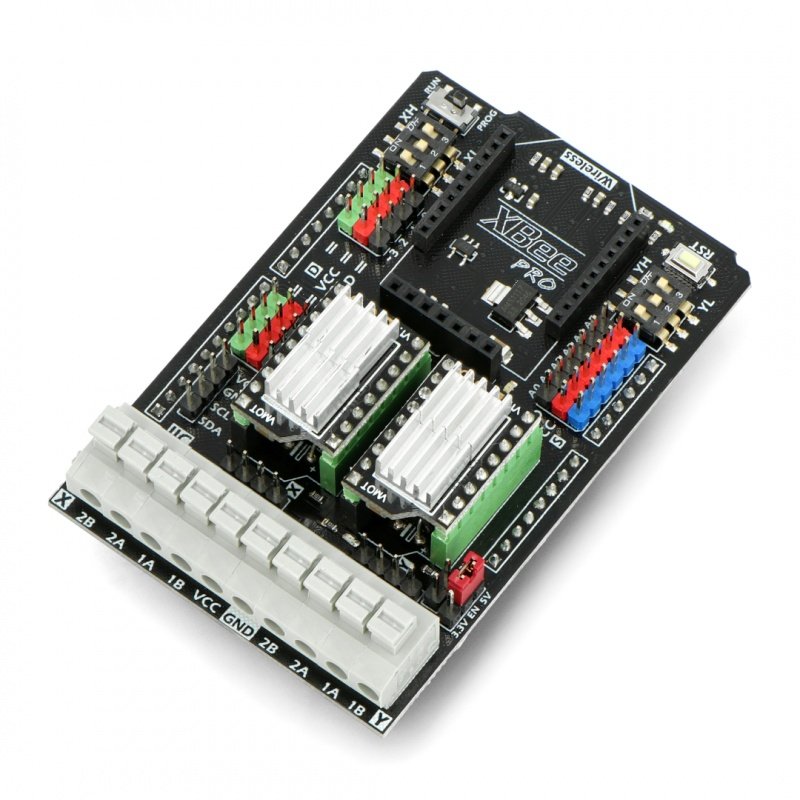





Arduino overlay for controlling two stepper motors via the popular DRV8825. On the board there is a socket for connecting XBee wireless modules and clamp connectors for easy connection of motors.
It is a cartridge for Arduino that allows to control twostepper motorsthrough the popularDRV8825 system.On the board there is a socket for connecting XBee wireless modules and clamp connectors for easy connection of motors.
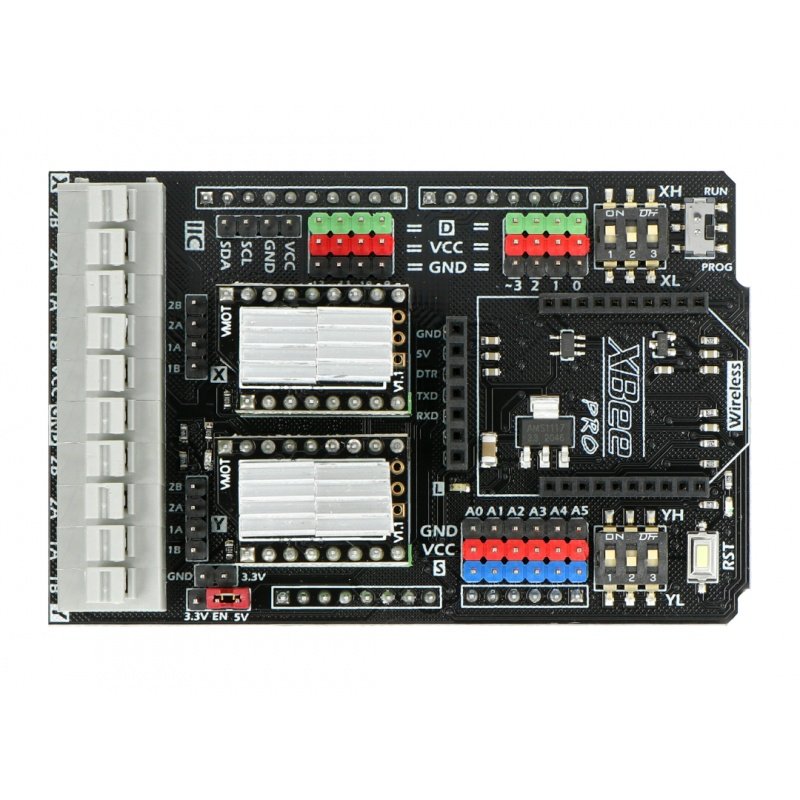
One pulse given on the STEP pin causes one step of the motor in the direction chosen by giving the appropriate logical state on the DIR pin. The STEP output of the controller no. 1 has been connected to D5 Arduino, DIR to D4 pin. The STEP output of the controller no. 2 to pin D6 and DIR to D7.

|
Product compatible with Arduino The manufacturer prepared auser guide with a sample codefor Arduino users. |
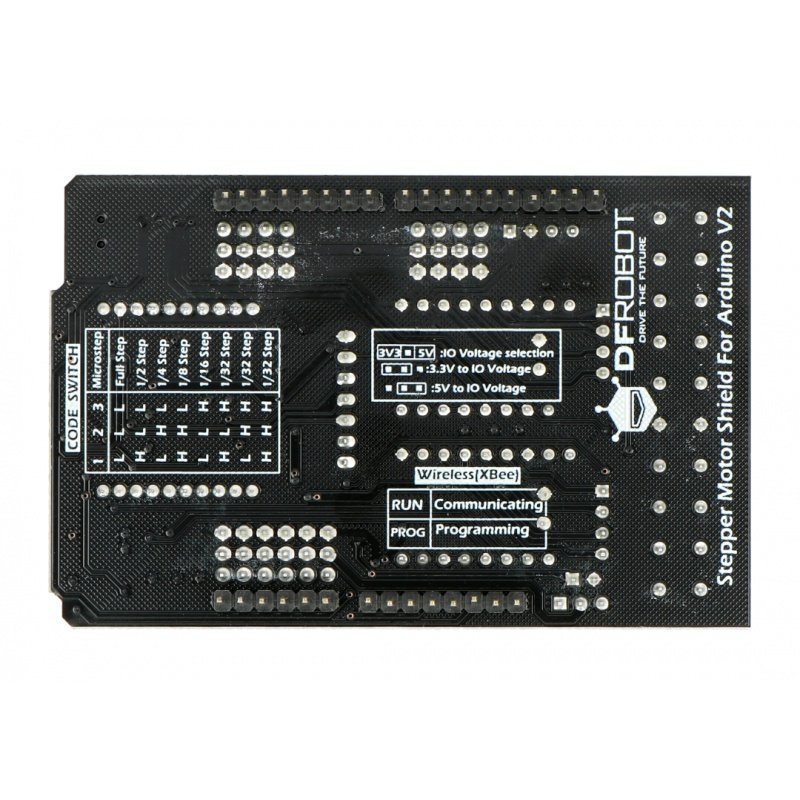
The module has the ability to block individual motor outputs. For this purpose, Arduino D8 and D12 outputs are used:
| Pin D8 | Pin D12 | M1 engine | M2 engine |
|---|---|---|---|
| low | low | Unlocked | Unlocked |
| high | low | Blocked | Unlocked |
| low | high | Unlocked | Blocked |
| high | high | Blocked | Blocked |
The motor supply voltage from 8.2 V to 45 V is given per VMOT pin.

The step size is selected using the switch. The possible settings are shown in the table below.
| MS1 | MS2 | MS3 | Resolution |
|---|---|---|---|
| low | low | low | Full step |
| high | low | low | 1/2 step |
| low | high | low | 1/4 step |
| high | high | low | 1/8th step |
| low | low | high | 1/16 step |
| high | low | high | 1/32 step |
| low | high | high | 1/32 step |
| high | high | high | 1/32 step |
Useful links |
| Package width | 12 cm |
| Package height | 4 cm |
| Package depth | 16 cm |
| Package weight | 0.036 kg |
Be the first to ask a question about this product!
Country of Origin: China
Manufacturer Contact Details: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin