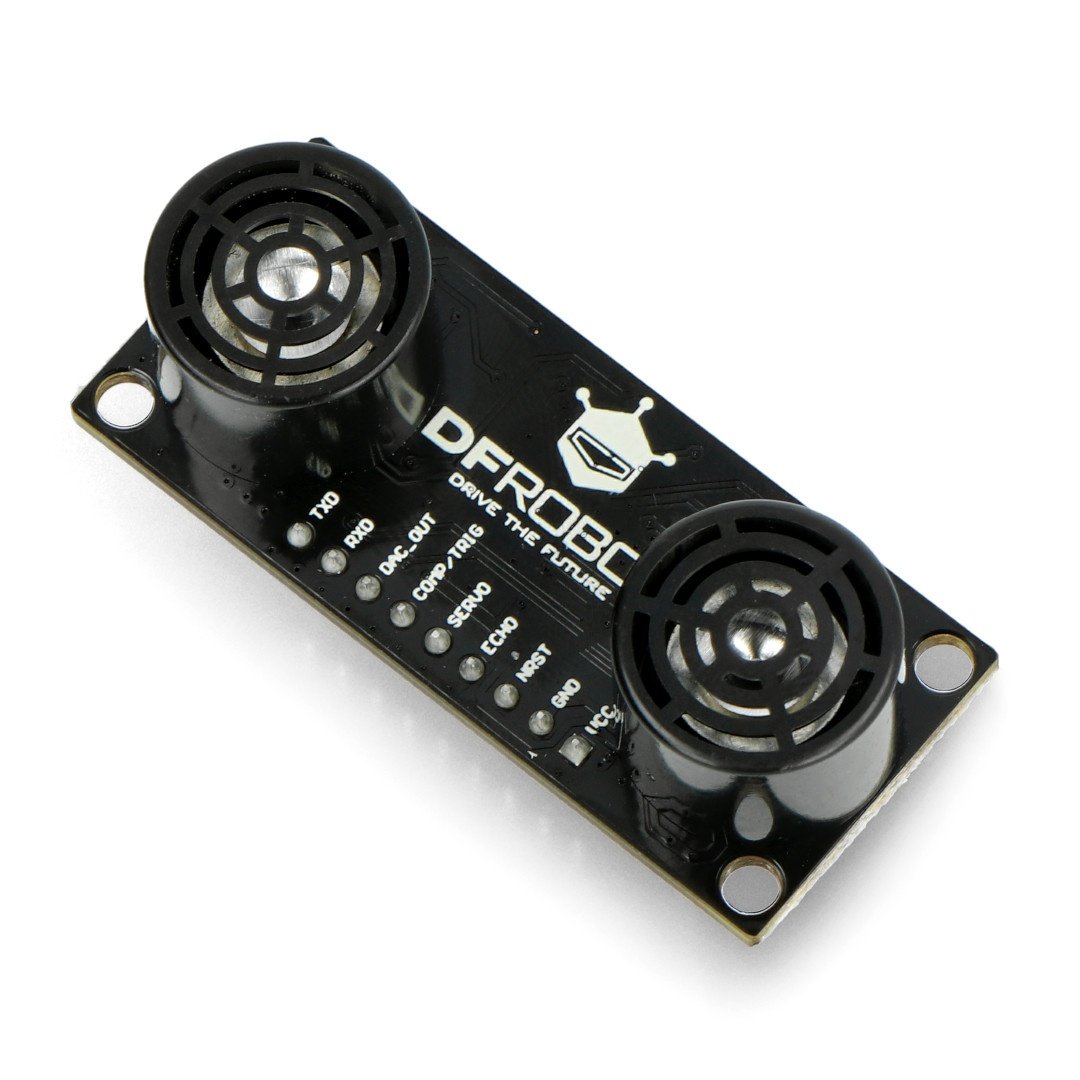























































































































































































































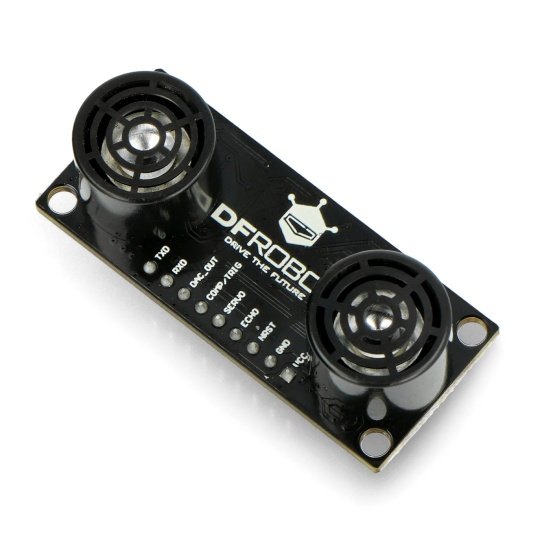
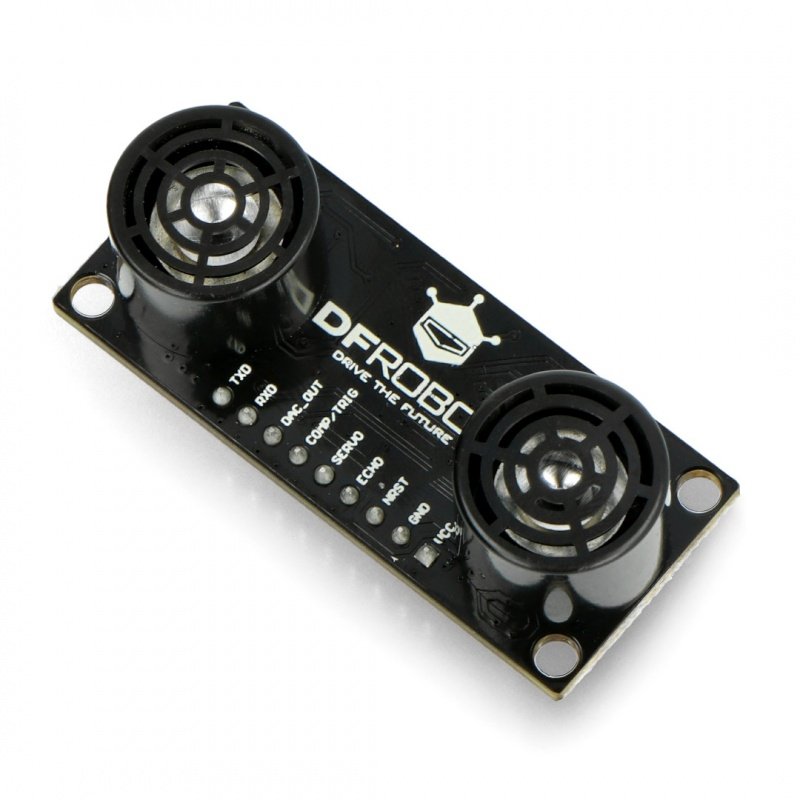




Ultrasonic sensor from DFRobot operating in the range from 2 cm to 800 cm. It is powered with the voltage from 3.3 V to 5,5 V. Communication is via serial interface UART (RX, TX) and has an analog and frequency output as well as compensation temperature.
Ultrasonic sensor from DFRobot operating in the range from 2 cm to 800 cm. It is powered with the voltage from 3,3 V to 5,5 V. Communication is via serial interface UART (RX, TX) and has an analog and frequency output as well as compensation temperature. The new modified algorithm provides high accuracy (1 cm) and small dead zone (up to 2 cm). Thanks to the introduction of MOTO, the user can directly controlthe modelling servo.
|
The product is compatible with Arduino The manufacturer has prepared a user manualalong witha libraryfor Arduino users. |

| Pin | Description |
|---|---|
| VCC | Supply voltage from 3.3 V to 5.5 V. |
| GND | The ground of the system |
|
NRST |
The system reset. |
|
ECHO |
The frequency output: from 0 to 25,000μs, with the change of 1 cm / 50 µS. |
|
SERVO |
Output for controlling the modelling servo. |
|
COMP/ Trig |
COMP - digital output - when the measured value is smaller than a certain threshold, the output goes into a low status. Trig - starting the measurement with the PWM signal. |
|
DAC_ OUT |
Analog output voltage proportional to the measured distance: 6.8 mV at 1 cm. |
| RXD | The receiver of the serial interface. |
| TXD | The transmitter of the serial interface. |
Detailed description of the pins along with examples of connections available in the user manual.
Useful links |
| Voltage to | 3.3 V |
| Voltage from | 5.0 V |
| Interface | PWM |
| Sensor - distance from | 5.0 cm |
| Package width | 5 cm |
| Package height | 2.5 cm |
| Package depth | 6 cm |
| Package weight | 0.02 kg |
Be the first to ask a question about this product!
Country of Origin: China
Manufacturer Contact Details: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]