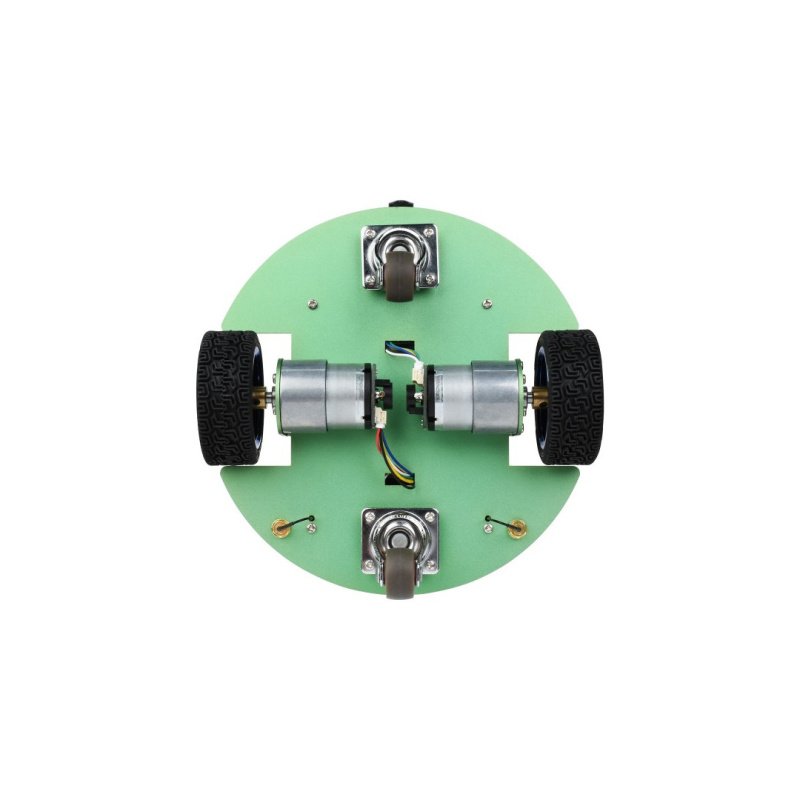
Kit for building a 2-wheeled JetBot intelligent robot platform. The tasks of the host controller are assumed by Waveshare Jetson Nano Kit, which is equipped with Jetson Nano Module 16GB in eMMC version, 4GB of memory. This controller is responsible for artificial intelligence, speech processing, visual processing, mapping and navigation. The Jetson Nano Developer Kit controller uses the Raspberry Pi RP2040 dual-core microcontroller, which has better real-time performance and higher control accuracy, is responsible for posture data collection and motion control. JetBot has the functions of face detection, following an object or a line. The device is able to map using the odometer and supports the Gmapping, Hector, Karto and Cartographer mapping algorithms.

JetBot - kit for building a 2-wheel robotic platform Al - full set - Waveshare 22791.
JetBot - kit for building a 2-wheeled Al robot platform with a camera - route mapping.
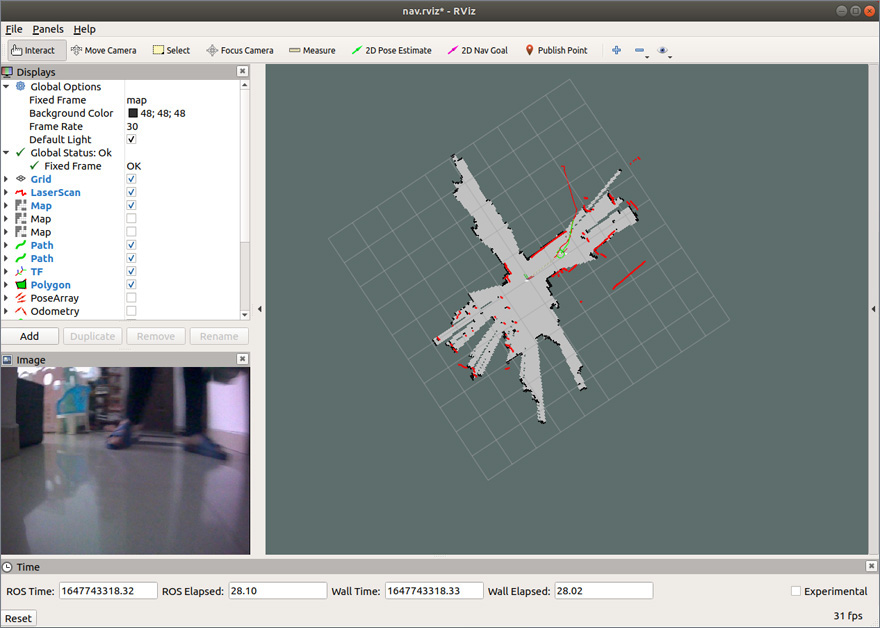
ROS is an open-source operating system that includes a collection of software libraries and tools for designing robots. It provides the services expected from the operating system, bottom-tier device control, inter-process message passing, and package management. ROS simplifies robot design and is the mainstream of robotic software in the world. ROS software: rviz, gazebo, rosbang, rqt_*
JetBot supports single-point navigation, multi-point patrol navigation, and real-time mapping.
One-point Guidance : After pointing to the target position, the robot will automatically plan a path to navigate to the target position.
Multi-point patrol navigation : after adding waypoints, the robot will move between them.
Mapping while navigating : after pointing to a destination, the robot will automatically explore the path to the destination and show it on the map

Kit contents.
 JetBot - set for building a 2-wheel robot platform Al.
JetBot - set for building a 2-wheel robot platform Al.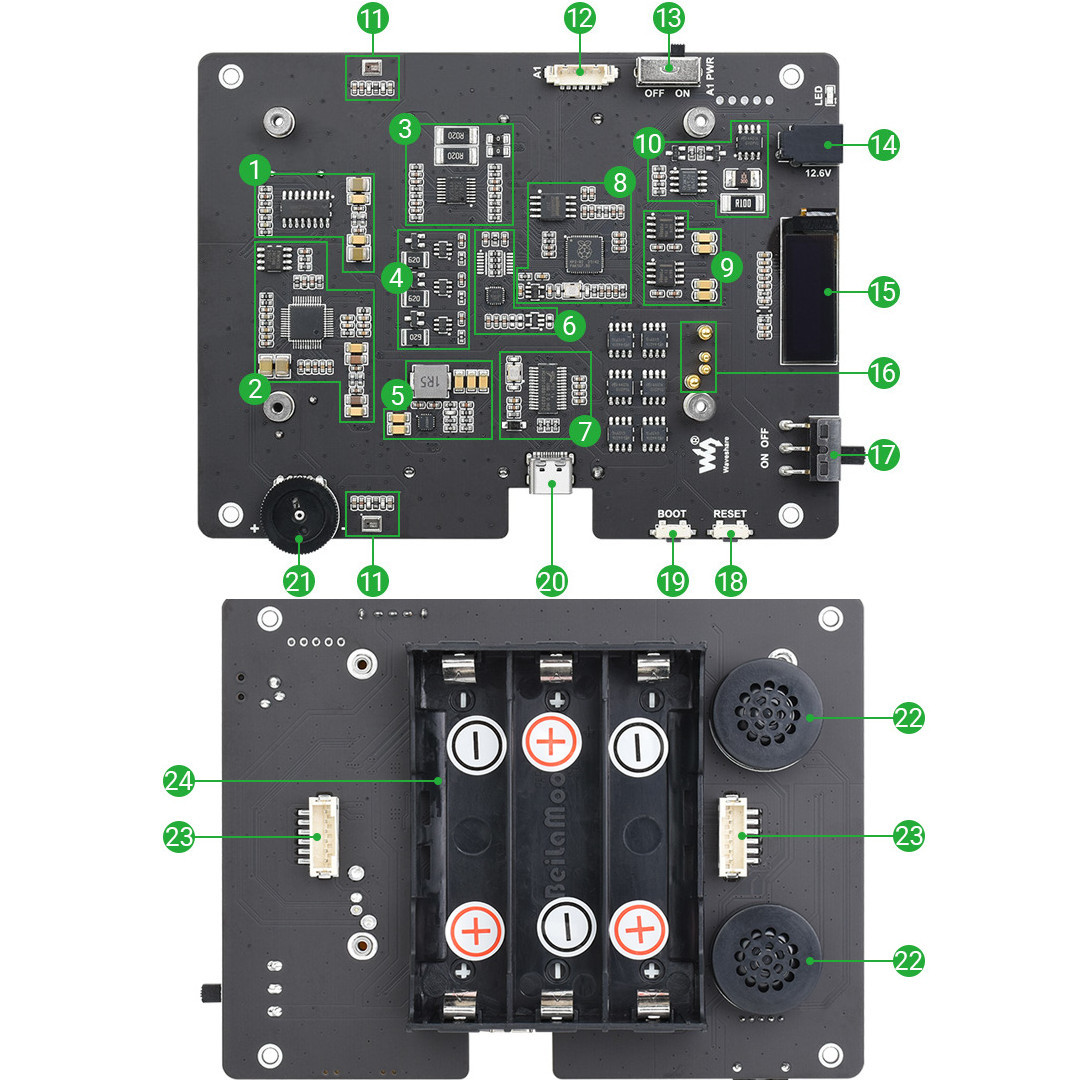
Description of pins on the board.
Useful links |
| Chassis - wheels | 2 |
| Chassis - type | wheel |
| Chassis + drive | yes |
| Chassis + driver: | yes |
| Niebezpieczne | Component |
| Package width | 35.3 cm |
| Package height | 21 cm |
| Package depth | 21 cm |
| Package weight | 2.123 kg |
| Marek Długosz
07/29/25 | Question: Good day, Does the kit include 18650 cells or do you have to buy them separately? Greetings |
Answer: The kit does not include batteries - they must be purchased separately. | |

Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: China
Manufacturer Contact Details: Seednew Limited 3/F, Building 6, Shanglilang Zhichuangyuan, Pingji Avenue, Nanwan Street, Longgang District, Shenzhen, 518115, China
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin