






















































































































































































































- Discontinued product







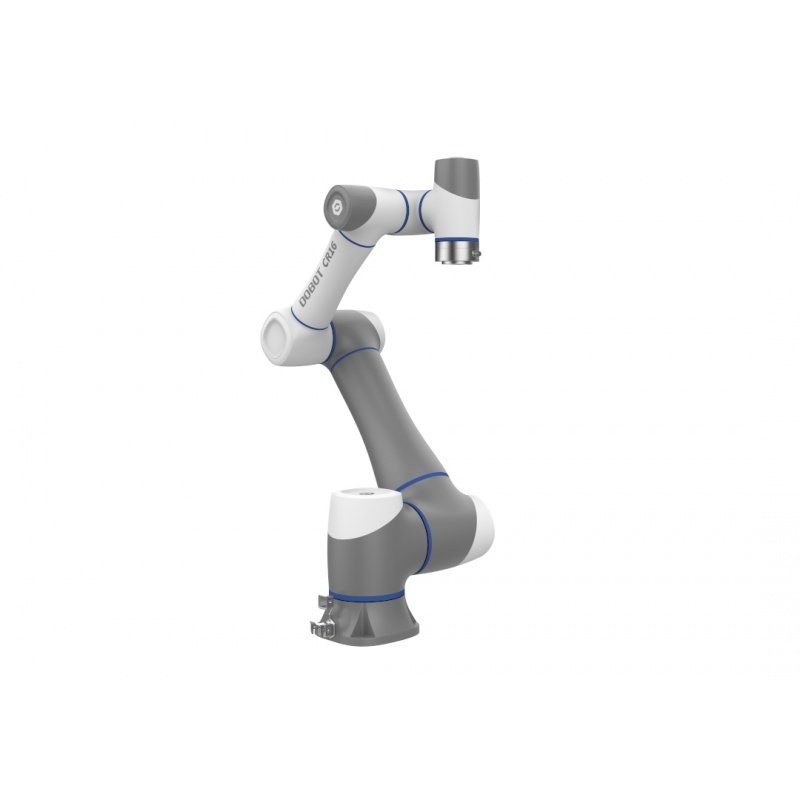
Robot arm with a maximum payload capacity of 16 kg and a reach of 1223 mm. The advanced design ensures safety by detecting possible collisions with nearby objects. The arm can be used as acollaborative robot, i.e. for direct integration with humans. The CR16 communicates via RS485, TCP/IP, Modbus, EtherCat or WiFi using an Android, iOS or Windows app. The range of motion is 360° or 160° for individual arm components. The device is manufactured by Dobot.
The purchase price of the robotic arm depends on the factory currently producing the product. If you wish to purchase the item, please contact us by e-mail: [email protected]
Presentation of Dobot CR series robot arms.
The CR series robotic arms are equipped with a control panel with LEDs indicating the current status of the robot. With one click of a button, the robot can be taught a specific, repeatable motion sequence.
It takes the user about 20 minutes to assemble a CR arm. After one hour, the robot is ready for use. The assembly is made easy by cables with dedicated connectors that ensure a seamless connection between the arm and the workstation.
The Dobot CR16 is compatible with a wide range of peripherals and accessories. It offers a wide catalog of possible operations such as feeding, assembling, screwing, inspecting, transferring, grinding and gluing. The controller is equipped with many I/O interf aces and a number of communication interfaces, which allow you to develop projects with new functionalities.
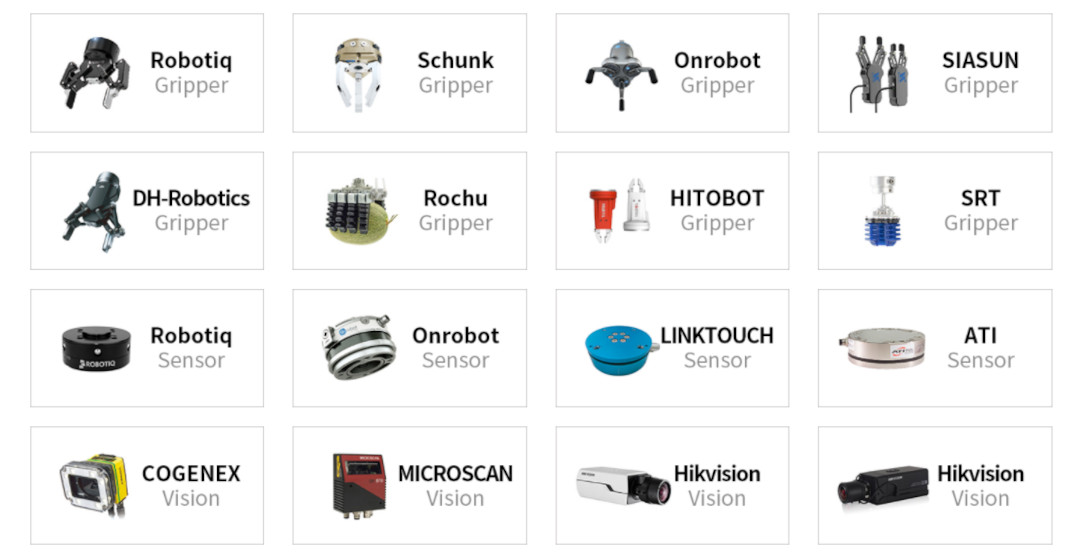 Compatible devices.
Compatible devices.
The SafeSkin technology can detect the possibility of an arm collision with a nearby object and emergency stop the robot movement to avoid a collision. The built-in sensor, which is immune to any interference, detects the object at a distance of 15 cm, ensuring that the robot reacts quickly and effectively.
To program the CR16 arm you can use the CRStudio graphical editor (programming is done by setting blocks with code) or in the Dobot SCStudio text editor.
| Parameter | Value | |
|---|---|---|
| Load capacity | 16 kg | |
| Maximum reach | 1223 mm | |
| Operating voltage | 48 V DC | |
| Maximum movement speed | 3 m/s | |
| Ranges of individual connectors | J1 | ±360° |
| J2 | ±360° | |
| J3 | ±160° | |
| J4 | ±360° | |
| J5 | ±360° | |
| J6 | ±360° | |
| Maximum speed for connectors | J1/J2 | 120°/s |
| J3/J4/J5/J6 | 180°/s | |
| I/O interfaces | DI/DO/AI | 2 |
| AO | 0 | |
| Communication interface | communication | RS485 |
| Controller I/O | DI | 16 |
| DO/DI | 16 | |
| AI/AO | 2 | |
| ABZ incremental encoder | 1 | |
| Repeatability | ±0.03 mm | |
| Communication | TCP/IP, Modbus, EtherCAT, WiFi | |
| Degree of protection IP | IP54 | |
| Working temperature | 0°C to 45°C | |
| Power | 350 W | |
| Material | aluminum alloy, ABS | |
| Weight | 40 kg | |
Useful links |
Be the first to ask a question about this product!
Country of Origin: China
Manufacturer Contact Details: SHENZHEN DOBOT CORP LTD Floor 9, 10, 14, 24, Building 2, Chongwen Park, Nanshan Zhiyuan, Liuxian Avenue, Nanshan District, Shenzhen, Guangdong China
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]