






















































































































































































































- Discontinued product




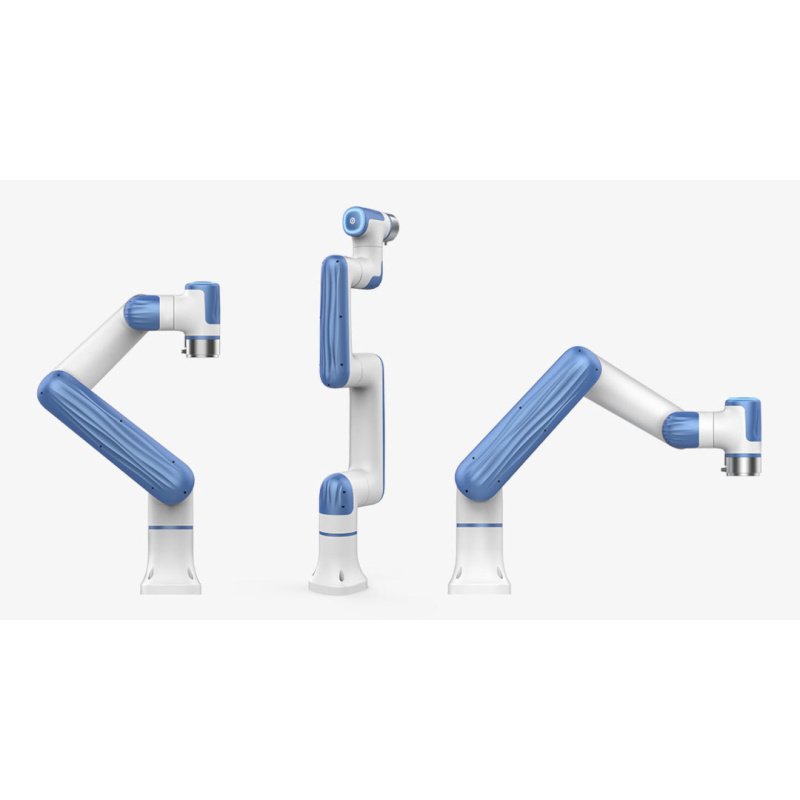
The Dobot Nova 2 robot arm , with six axes of freedom , a reach of up to 625 mm and a payload of up to 2 kg , is the ideal solution for precise and complex tasks. Its design allows for smooth and quick movements, so it can be used for a variety of purposes, from science to production. Dobot Nova 2 is small in size, requiring only 1 m 2 of space. The arms of the Nova series have a range of motion of 625 mm (Nova 2) and 850 mm ( Nova 5 ). They are 33% - 44% lighter and 20% smaller than the CR series arms.

Dobot Nova 2 robotic arm.
Dobot Nova 2 is extremely easy to use. Its intuitive user interface, coupled with advanced software, makes it easy for both novice and advanced users to use with minimal effort. The arm is able to reproduce the user's previously made movement, and thanks to the graphical interface, no programming skills are required. Cobot activities can be seamlessly monitored and managed via the cloud.
Safety is key for the Dobot Nova 2. That's why it's equipped with advanced safety features, including an emergency stop system that reacts in just 0.01 seconds when a collision is detected. In addition, it has the function of detecting human movement and the function of stopping operation when the power is turned off. Thanks to its multifunctionality, Dobot Nova 2 is an extremely versatile device. Its payload of 2 kg makes it an ideal tool for technology education as well as for small and medium-scale production tasks.
| Specification and comparison of Dobot Nova arms | ||
|---|---|---|
| Model | Nova 2 | Nova 5 |
| Mass | 11 kg | 14 kg |
| Maximum payload | 2 kg | 5 kg |
| range of motion | 625mm | 850mm |
| Maximum TCP speed | 1.6 m/s | 2 m/s |
| Number of axes of freedom | ||
| J1 | ||
| J2 | ||
| J3 | ±156° | ±160° |
| J4 | ||
| J5 | ||
| J6 | ||
| J1 | 135°/sec | 100°/sec |
| J2 | 135°/sec | 100°/sec |
| J3 | 135°/sec | 100°/sec |
| J4 | 135°/sec | 100°/sec |
| J5 | 135°/sec | 100°/sec |
| J6 | 135°/sec | 100°/sec |
| inputs / outputs | ||
| RS485 interface | ||
| Repeatability | ||
| IP protection class | ||
| Volume | 65dB(A) | 70dB(A) |
| Working temperature | ||
| Typical power consumption | 100W | 230W |
| Maximum power consumption | 250W | 770W |
| Installation orientation | ||
| Cable length from robot to controller | ||
| Material | ||
| Controller | ||
| Dimensions | 200x120x55mm | |
| Mass | 1.3 kg | |
| input voltage | from 30V to 60V DC | |
| Number of digital inputs | 8 inputs (NPN or PNP) | |
| Number of digital outputs | 8 outputs (NPN or PNP) | |
| Number of analog inputs | 2 inputs, voltage, 0 V to 10 V | |
| Number of analog outputs | 2 outputs, voltage, 0 V to 10 V | |
| On/Off remote power control | Yes | |
| Network interfaces | 2, for TCP/IP and Modbus TCP communication | |
| USB interface | 2, for connecting the USB wireless module | |
| RS485 interface | 1, for RS485 and Modbus RTU communication | |
| Working temperature | from 0°C to 50°C | |
| Working humidity | up to 95%, non-condensing | |
| IP protection class | IP20 | |
| Cooling mode | Passive | |
| learning mode | PC, APP (Android, iOS) | |
Useful links |
Be the first to ask a question about this product!
Country of Origin: China
Manufacturer Contact Details: SHENZHEN DOBOT CORP LTD Floor 9, 10, 14, 24, Building 2, Chongwen Park, Nanshan Zhiyuan, Liuxian Avenue, Nanshan District, Shenzhen, Guangdong China
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]