













































































































































































































































































































































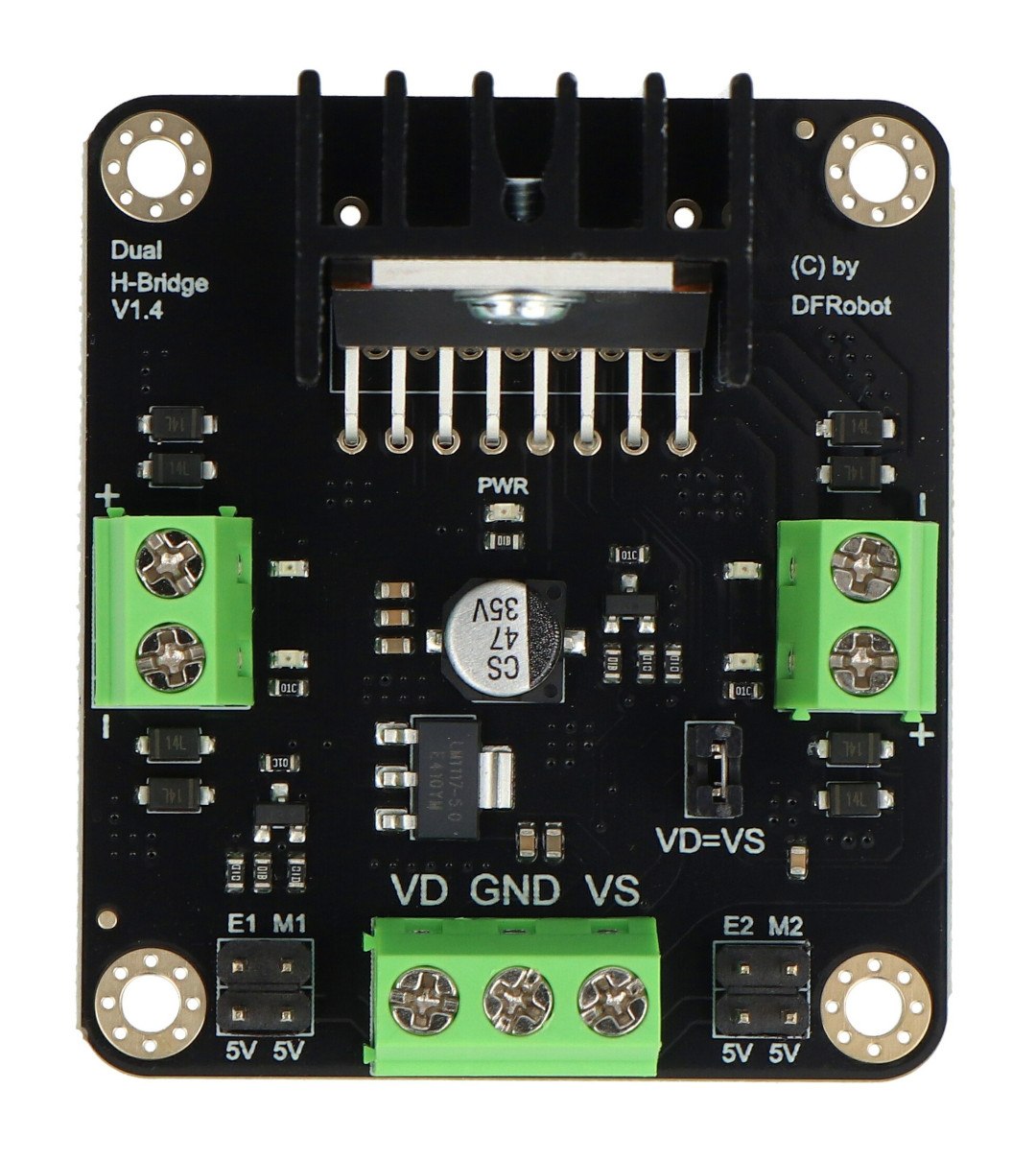
Two-channel DC motor controller based on L298N system. Supply voltage is up to 12 V. Maximum current per channel is 2 A. The system has a built-in voltage regulator 5 V, to supply the logical part.
Two-channeldirect current motorcontroller based on the L298N system,whichenablescontrol of direction of rotationand speed.Thanks toARKscrew connections,the power supply andthemotors themselves can be easily connected by screwing the wires with a screwdriver. Control signals have been output to popular goldpin connectors, which allows to connect the system with starter boards, e.g. from Arduinousingwires.
| The manufacturer has made availablea user guidefor easy operation of the module. |

|
E |
N |
Action |
|---|---|---|
|
state of |
state of low/high |
Stop. |
| Status high |
state of high |
Reverse engine rotation. |
| Status high |
state of low |
Engine rotation. |
| PWM |
state of low/high |
Speed control. |
Film describing the operation of the H-bridge - direct current motor controller.
Useful links |
| Voltage to | 5.0 V |
| Voltage from | 12.0 V |
| Current | 2 A |
| Channels | 2 |
| Niebezpieczne | Component |
| Package width | 8.5 cm |
| Package height | 2.7 cm |
| Package depth | 12 cm |
| Package weight | 0.032 kg |
Be the first to ask a question about this product!
Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: China
Manufacturer Contact Details: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]



