



The u-blox NEO-M8U GPS module with Dead Reckoning provides accurate navigation even without a satellite signal. It supports multiple GNSS systems , runs on Qwiic technology, and is ideal for mobile applications, including autonomous vehicles and robots.
For proper operation of the module, an external antenna with a U.FL connector is required, which is not included in the kit and must be purchased separately.
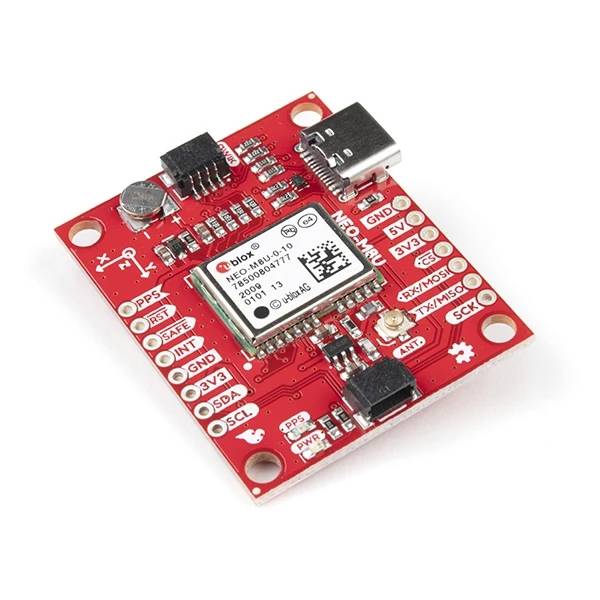
The u-blox NEO-M8U GPS module with a 72-channel GNSS receiver utilizes Untethered Dead Reckoning (UDR) technology, enabling continuous positioning even in the event of complete GNSS signal loss—for example, in short tunnels or underground parking garages. The receiver provides a positioning accuracy of approximately 2.5 meters , supports simultaneous data reception from three GNSS constellations (GPS, GLONASS, Galileo, BeiDou), and offers an update rate of up to 30 Hz . An integrated accelerometer and gyroscope enable precise, real-time movement tracking. The board is equipped with I2C (Qwiic), UART, and SPI (after activating a jumper) interfaces, and configuration is possible via a USB Type-C port using the u-center software. Additionally, SparkFun provides an Arduino library for easy integration with microcontrollers. An external GNSS antenna with a U.FL socket is required for operation, which is not included in the kit and must be purchased separately.
The manufacturer has prepared a detailed user guide to help you get started with the module. Check it out!
NEO-M8U GPS module - Dead Reckoning - Qwiic - SparkFun GPS‑16329.
The NEO-M8U uses Untethered Dead Reckoning (UDR) technology, which provides highly accurate and continuous positioning.
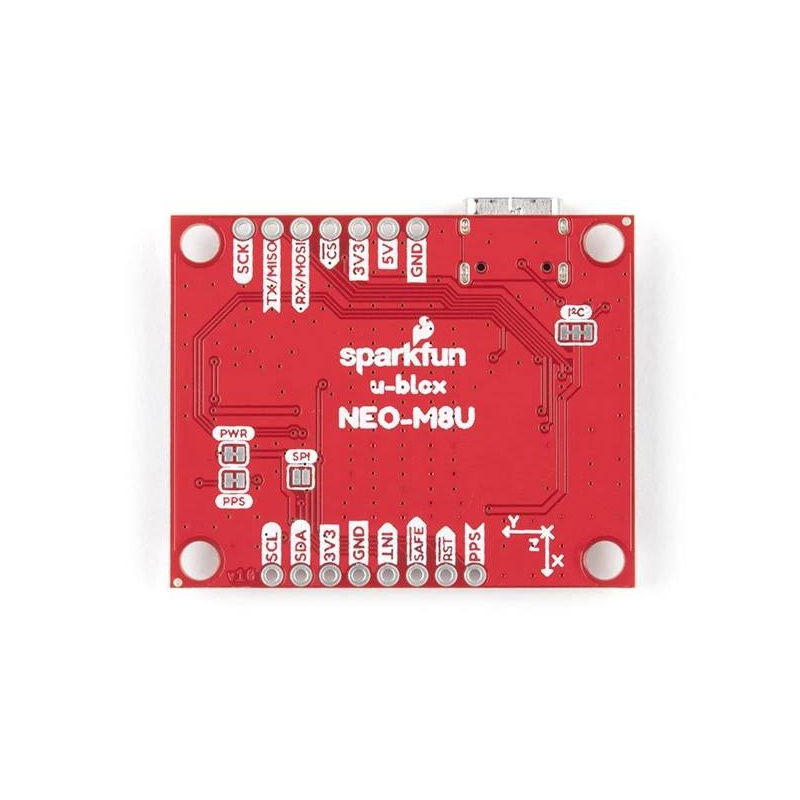
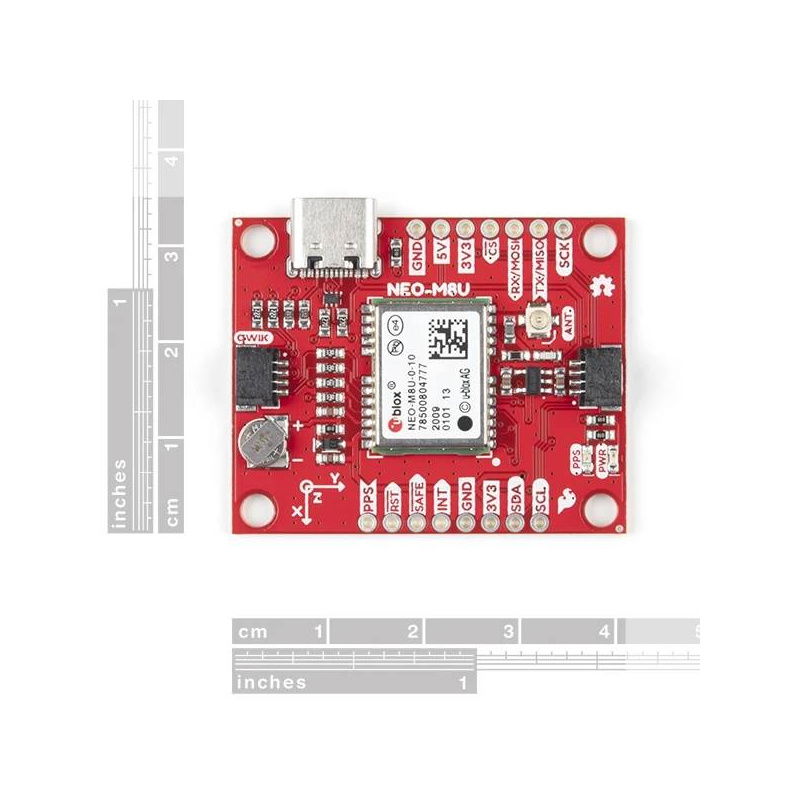
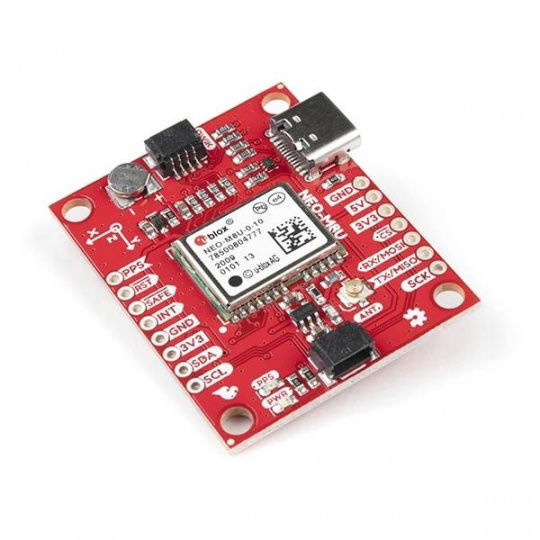
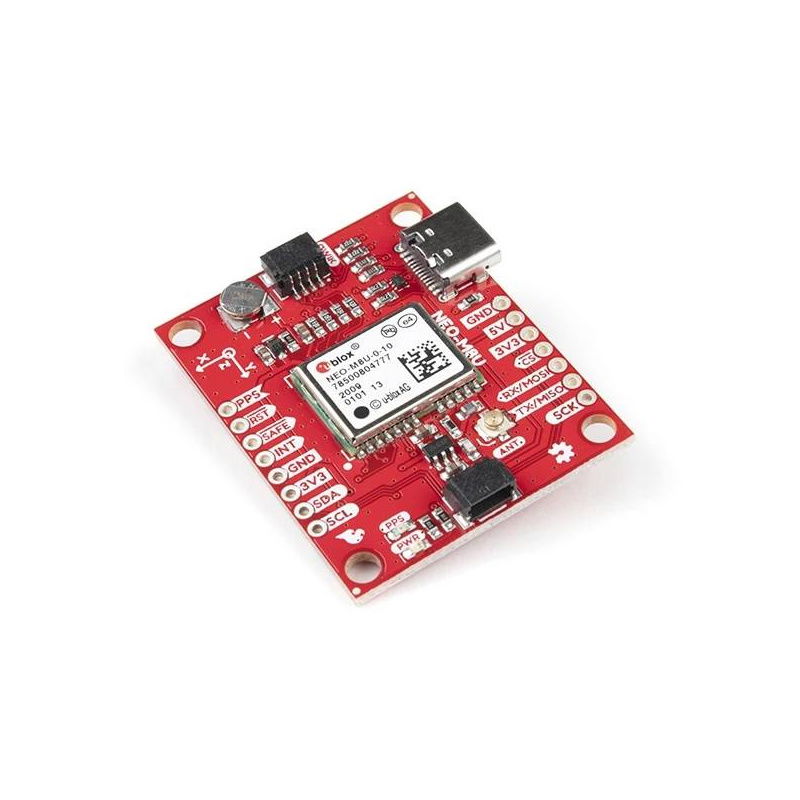
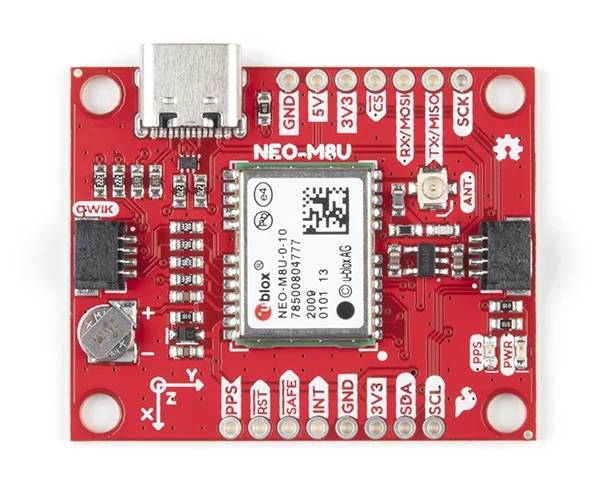
The module is powered by 3.3V and provides a wide range of pins: a U.FL connector for connecting an antenna, two Qwiic connectors , I2C, SPI, and UART interfaces, and functional pins: PPS, RESET, SAFEBOOT, and INT. The board also includes LEDs for power and pulse-time (PPS) indication, as well as configuration jumpers for modifying interface functions. The built-in IMU sensor (accelerometer and gyroscope) provides additional motion and orientation data.
The module can be programmed using the Arduino IDE and the official SparkFun u-blox GNSS library. You can also configure operating parameters via the UBX protocol or using the u-blox u-center tool. Configurable features include refresh rate, geofencing, power-saving mode, spoofing detection, and more.
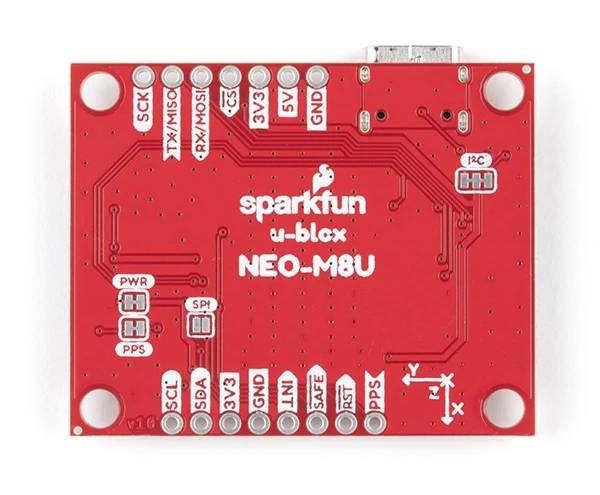
The board has a built-in battery that powers the real-time clock (RTC).
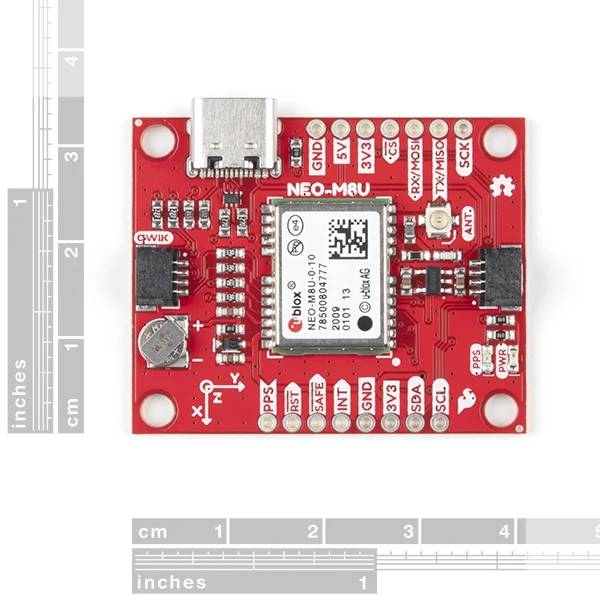
Compact dimensions will work well in many projects.
| Niebezpieczne | Component |
| Package width | 5 cm |
| Package height | 9.4 cm |
| Package depth | 0.5 cm |
| Package weight | 0.007 kg |
Be the first to ask a question about this product!
Product Information
The product is a component intended for further assembly/prototyping. It does not constitute a standalone finished product within the meaning of product safety regulations.
Dane GPSR
Country of Origin: United States
Manufacturer Contact Details: SparkFun Electronics 6333 Dry Creek Pkwy, Niwot, CO 80503, Stany Zjednoczone
EU Marketer Contact Details: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin