







The Unitree G1 Edu U5 is an advanced AI humanoid robot designed for research into manipulation, artificial intelligence, and human dexterity. Equipped with 41 degrees of freedom, two five-fingered RH56DFQ hands, a depth camera, and a 3D LiDAR scanner, it enables complex manipulation operations and working with everyday tools and objects. The platform offers high computing power, extensive programming capabilities, and support for advanced AI algorithms.
The Unitree G1 Edu U5 is a professional humanoid platform designed for research laboratories, technical universities, and teams developing artificial intelligence and humanoid robotics systems. The robot combines advanced mechanics, high computing power, and an advanced perception system enabling complex manipulation tasks requiring very high precision. The Edu U5 is based on the G1 Edu Advanced Edition platform and is equipped with two advanced five-fingered RH56DFQ hands . These hands allow the robot to grasp tools, manipulate irregular objects, and perform tasks requiring high dexterity and adaptive motion control. Combined with seven-axis arms and a three-axis waist, the design offers a total of 41 degrees of freedom , allowing it to replicate natural human movements and perform complex manipulation operations. The robot utilizes a depth camera and a 3D LiDAR scanner for environmental perception, supports WiFi 6 and Bluetooth 5.2 , and a 9000 mAh intelligent battery provides approximately 2 hours of operation. The knee joint has a maximum torque of 120 Nm, and the arm can move objects weighing up to approximately 3 kg. AI processing is handled by a powerful 8-core processor and the Nvidia Jetson Orin platform, offering computing power of up to 100 TOPS.

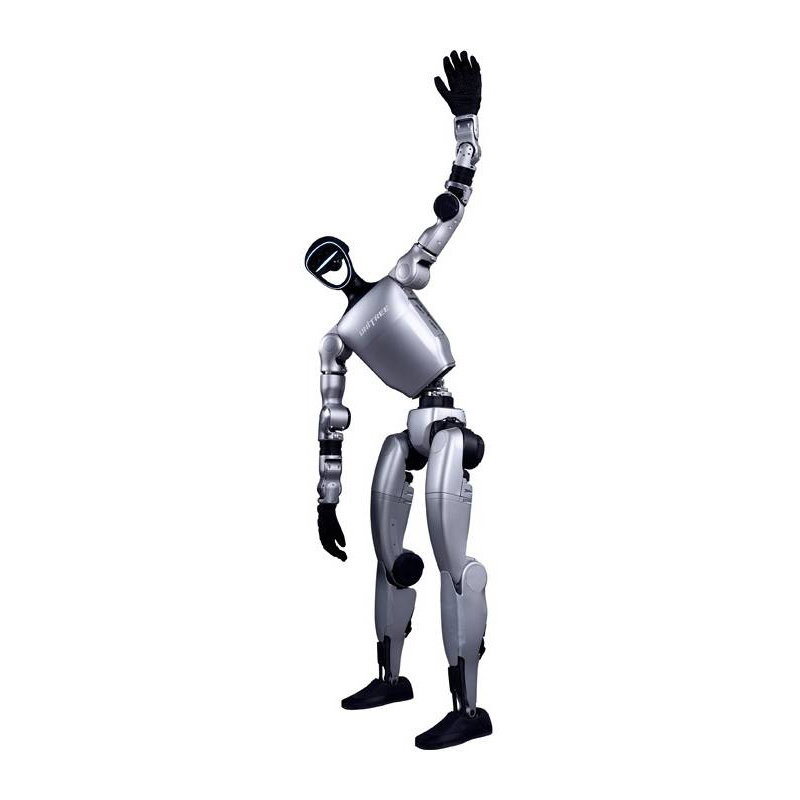
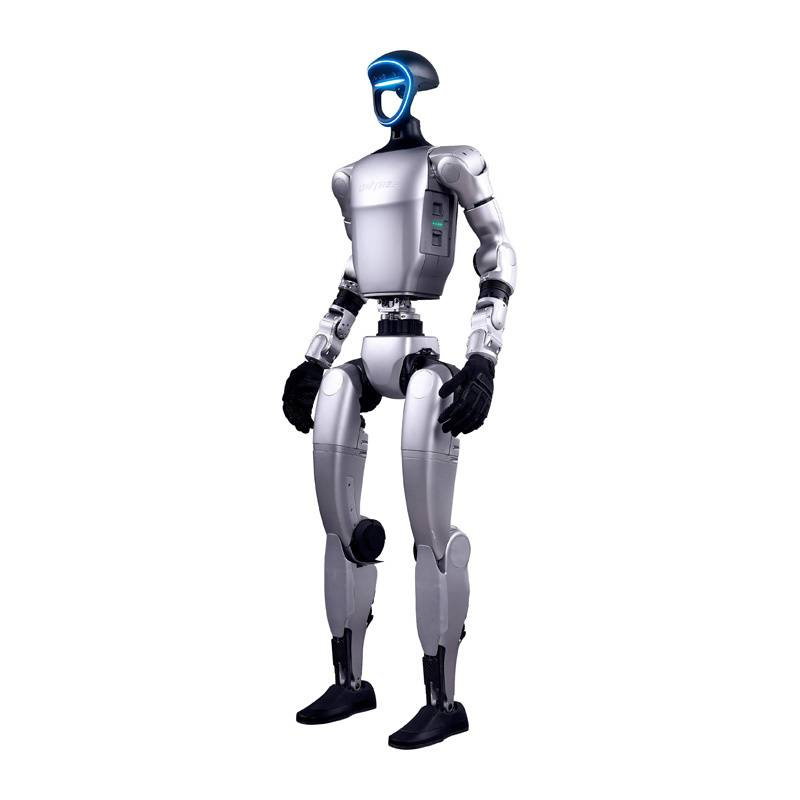
Humanoid robot - Unitree G1 Edu U5.
The G1 Edu is equipped with a Livox MID-360 3D LiDAR system and an Intel RealSense depth camera.
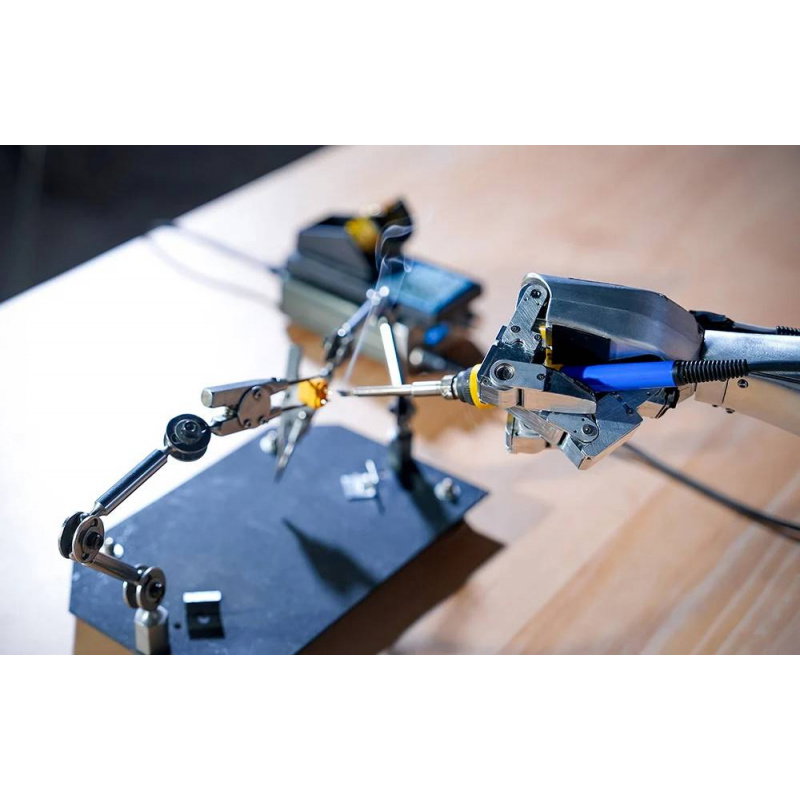
Unitree G1 Edu U5 uses an advanced humanoid design offering up to 41 degrees of freedom , enabling highly natural full-body movements and complex manipulation operations. The robot can walk smoothly, maintain balance, and perform dynamic limb and torso movements. The design includes seven-axis arms, a three-axis waist, and advanced five-fingered RH56DFQ hands that enable precise gripping and manipulation movements. This allows the robot to operate tools, lift irregular objects, and perform tasks similar to human manual labor. Low-inertia PMSM motors and industrial cross-roller bearings ensure high dynamics, ensuring high durability and precision. The design has been optimized for research on manipulation and physical interaction with the environment.
The model has 41 degrees of freedom and is equipped with two hands with five fingers.
The robot's design is inspired by human anatomy, which translates into a natural way of moving and high stability.
The robot is equipped with an advanced perception system based on a depth camera and a 3D LiDAR scanner, enabling spatial analysis, environment mapping, and real-time obstacle detection . The platform supports research on autonomy, machine vision, and intelligent motion planning. The audio system includes a four- microphone array and a 5W speaker, enabling voice communication and integration with AI systems using speech recognition and human-robot interaction. The Unitree Explore APP allows monitoring of the robot's operating parameters, IMU data, temperatures, and system alarms. The software also enables joint calibration and platform-wide diagnostics.
The Unitree G1 Edu U5 has a compact design , measuring 1320 mm high and weighing approximately 35 kg . Efficient drives provide a maximum knee torque of 120 Nm , enabling dynamic and stable movement during complex manipulation operations. The robot can carry objects weighing up to approximately 3 kg per arm while maintaining high control precision. The RH56DFQ's five-fingered hands enable adaptive gripping of objects of various shapes and sizes, significantly increasing the platform's manipulative capabilities. A 9000 mAh intelligent battery provides approximately 2 hours of operation , and a quick-change system helps reduce downtime during research and experiments.
The robot is powered by a battery that provides approximately 2 hours of operation.
Open architecture supports Secondary Development, allowing full control over the system.
The G1 Edu U5 platform was designed as an open research environment supporting the development of proprietary AI, autonomy, and humanoid control systems. The robot utilizes an 8-core processor and the Nvidia Jetson Orin platform, providing up to 100 TOPS of computing power. The manufacturer provides technical documentation, APIs, implementation examples, and development tools enabling the development of high-level and low-level applications. The platform supports research on control, perception, motion planning, and intelligent manipulation. WiFi 6 and Bluetooth 5.2 connectivity enable integration with computers, laboratory environments, and external control systems. Over-the-air (OTA) updates allow for convenient development of the robot's functionality and software updates.
| UnitreeG1 Edu U5 Technical Specifications | |
|---|---|
| Total degrees of freedom | 41 |
| Degrees of freedom of the leg | 6 |
| Degrees of freedom of the waist | 3 |
| Degrees of freedom of the arm | 5 |
| Degrees of freedom of the hand | 7 (optional force control for three-fingered hand + 2 additional degrees of freedom for the wrist) |
| Dex3-1 Hand Parameters | thumb: 3 active degrees of freedom, index finger: 2 active degrees of freedom, middle finger: 2 active degrees of freedom |
| Optional installation of touch sensors | yes (included) |
| Joint bearings | industrial cross roller bearings with high precision and high load capacity |
| Joint motors | PMSM permanent magnet synchronous motors with a low-inertia internal rotor |
| Maximum knee joint torque | 120 N*m |
| Maximum load on the arm | about 3 kg |
| Calf and thigh length | 0.6 m |
| Arm span | about 0.45 m |
| Waist range of motion | Z ±155°, X ±45°, Y ±30° |
| Knee range of motion | from 0° to 165° |
| Hip range of motion | P ±154°, R from -30 to 170°, Y ±158° |
| Wrist range of motion | P ±92.5°, Y ±92.5° |
| Full internal cable management | Yes |
| Joint encoder | double encoder |
| Cooling system | local air cooling |
| Battery type | 13-cell lithium-ion battery |
| Basic computing power | High-performance 8-core processor |
| Sensors and communications | depth camera + 3D LiDAR |
| 4-microphone array | Yes |
| Loudspeaker | 5 in |
| Wireless connectivity | WiFi 6, Bluetooth 5.2 |
| High-performance computing module | Nvidia Jetson Orin |
| Quick-connect battery | Yes |
| Battery capacity | 9000 mAh |
| Charger | 54V / 5A |
| Manual controller | Yes |
| Working time | about 2 hours |
| OTA updates | Yes |
| Possibility of further development | Yes |
| Dimensions in standing position | 1320 x 450 x 200 mm |
| Dimensions when folded | 690 x 450 x 300 mm |
| Weight with battery | over 35 kg |
| G1 Edu Version Comparison | ||||
|---|---|---|---|---|
| Model | DOF | Hands | Touch sensors | |
| G1 Edu U1 | 23 | lack | NO | |
| G1 Edu U2 | 29 | lack | NO | |
| G1 Edu U3 | 43 | 2 x Dex3-1 | NO | |
| G1 Edu U4 | 43 | 2 x Dex3-1 | Yes | |
| G1 Edu U5 | 41 | 2 x RH56DFQ | NO | |
| G1 Edu U6 | 41 | 2 x RH56DFTP | yes - 17 sensors / hand | |
| G1 Edu U7 | 41 | 2 x Revo 2 Basic | NO | |
| G1 Edu U8 | 37 | 2 x Dex3-1 | NO | |
| G1 Edu U9 | 37 | 2 x Dex3-1 | yes - 33 sensors / hand | |
| G1 Edu U10 | 35 | 2 x Revo 2 Basic | NO | |
Useful links |
| Niebezpieczne | Equipment |
Be the first to ask a question about this product!