







The Unitree G1 Edu U2 is an advanced AI humanoid robot equipped with 29 degrees of freedom , an Nvidia Jetson Orin module, and a depth camera + 3D LiDAR perception system. It offers up to 120 N*m of knee torque, an arm payload of up to 3 kg , and stable locomotion thanks to 6 DoF per leg and 3 DoF at the waist . Powered by a 9000 mAh battery (up to 2 hours of operation), it supports WiFi 6, Bluetooth 5.2 , and AI development via an open development platform.
The Unitree G1 Edu U2 is a professional humanoid educational and research robot , designed as a platform for working with artificial intelligence algorithms, motion control, and 3D perception. The design offers 29 degrees of freedom , including 6 DoF per leg, an extended waist (3 DoF), and advanced manipulators with an optional Dex3-1 hand. The robot utilizes low-inertia PMSM motors , industrial cross-roller bearings, and dual encoders, ensuring high precision and dynamic movement. The maximum knee joint torque is 120 Nm , and the maximum arm load is approximately 3 kg . A sensory system based on a depth camera and 3D LiDAR enables advanced environmental analysis and autonomous navigation. Data processing is performed by an 8-core processor and an Nvidia Jetson Orin module, supporting AI and machine learning applications. The robot offers WiFi 6 and Bluetooth 5.2 connectivity, voice communication (4 microphones + 5W speaker), and a 9000 mAh battery (up to 2 hours of operation). The platform supports OTA and Secondary Development , making it ideal for laboratories, universities, and R&D teams.

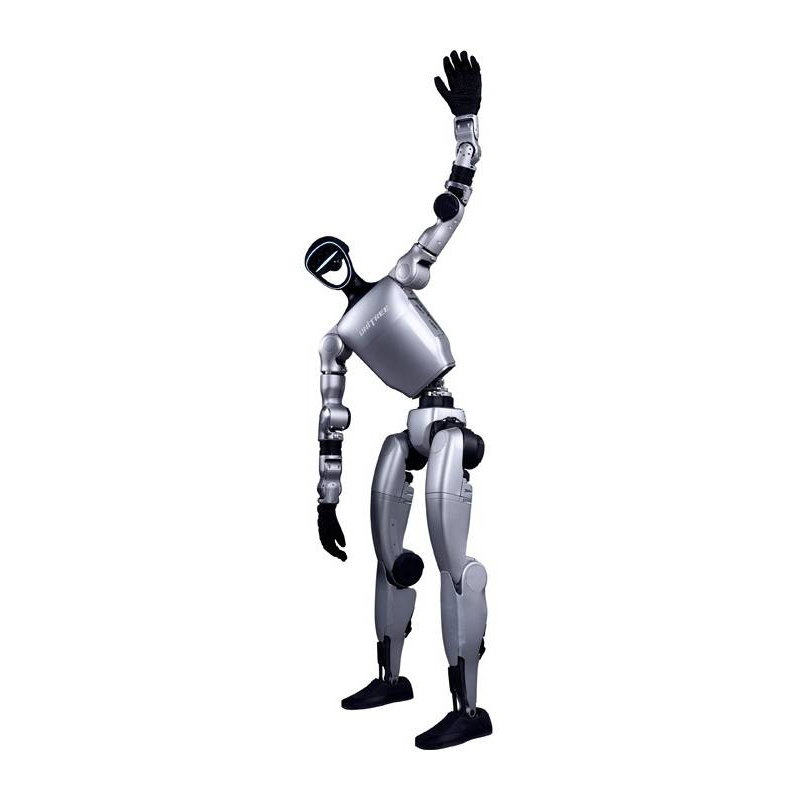
Humanoid robot - Unitree G1 Edu U2.
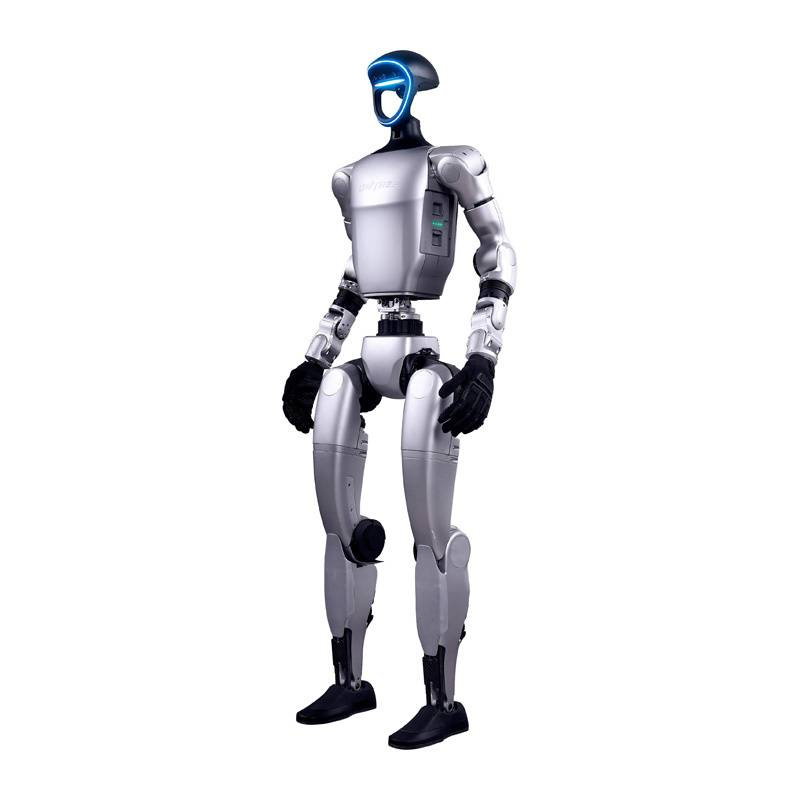
G1 Edu U2 equipped with an Nvidia Jetson Orin compute unit, a Livox MID-360 3D LiDAR system and an Intel RealSense depth camera.
The Unitree G1 Edu U2 humanoid robot was designed with clear inspiration from human anatomy , resulting in natural movements and greater fluidity throughout the entire body. The model offers an extensive range of motion at the waist, hips, knees and wrists, allowing it to perform more complex movement sequences and maintain balance when changing direction and position. Three axes of movement at the waist allow for better center of gravity compensation during dynamic running (up to 2 m/s) . Six degrees of freedom in each leg allow the robot to move smoothly on uneven surfaces while maintaining full balance, and precise joint control improves stability during movement and expands research capabilities in the area of locomotion.
The model has 29 degrees of freedom (DoF), which, with a height of 1320 mm and a weight of 35 kg, gives it unprecedented agility.
The U2 version places particular emphasis on torso stability - additional degrees of freedom at the waist (X and Y axes) allow for better compensation of the center of gravity.
The Unitree G1 Edu U2 utilizes a sensor suite, including a depth camera and 3D LiDAR , enabling real-time environmental analysis, obstacle detection, and accurate workspace imaging . This solution supports research on autonomy, motion planning, navigation, and robot orientation in dynamic environments. The perception system is complemented by an audio channel consisting of four microphones and a 5W speaker , enabling the development of projects related to voice communication, command response, and human-robot interaction. Echo cancellation makes the robot an excellent interactive assistant, clearly responding to voice commands and communicating system status to the user.
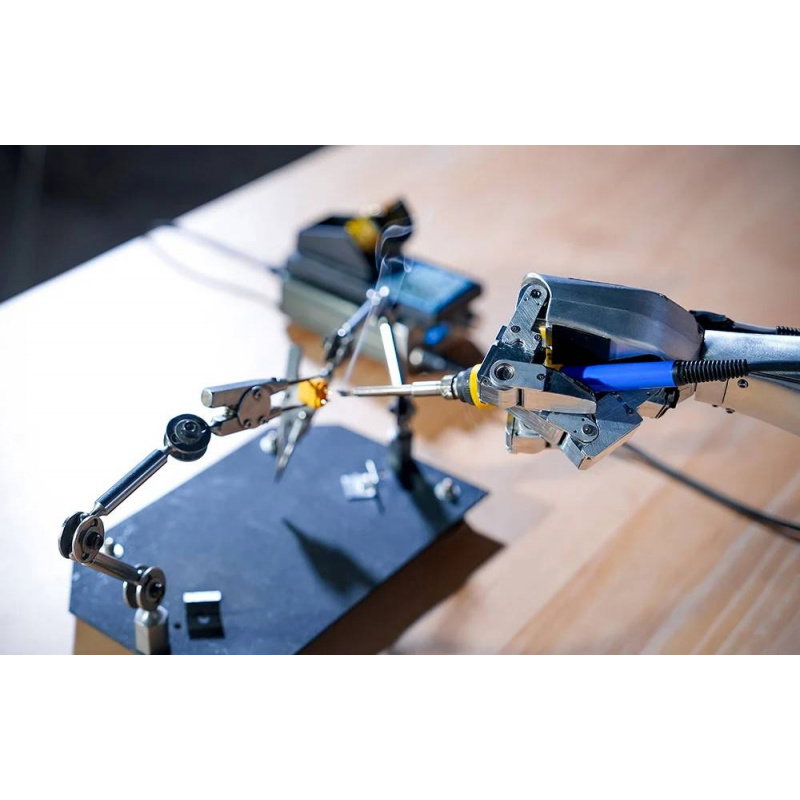
With a height of 1320 mm and a weight of over 35 kg, the robot strikes a favorable balance between mobility and structural stability. A maximum knee joint torque of 120 Nm and industrial roller bearings enable dynamic movements with high control precision. An additional advantage is the maximum arm load of approximately 3 kg , which increases the platform's usefulness in research on manipulation, grasping, and interaction with objects.
G1 Edu U2 uses an advanced vision system combining 360° laser scanning (LiDAR) with stereoscopic imaging.

The open architecture supports Secondary Development, allowing full control of the system using ROS2 or C++.
The robot is equipped with WiFi 6 and Bluetooth 5.2 , which facilitates integration with applications, control systems, and research environments. Power is provided by a 13-cell lithium battery with a capacity of 9000 mAh (allowing for approx. 2 hours of operation) with a quick-change function, and the included 54V 5A charger allows you to quickly prepare the robot for further tests. The Edu version supports further software development, OTA updates, and work with advanced algorithms , making the platform well-suited for programming in the areas of robotics, artificial intelligence, and motion control.
| UnitreeG1 Edu U2 Technical Specifications | |
|---|---|
| Total degrees of freedom | 29 |
| Degrees of freedom of the leg | 6 |
| Degrees of freedom of the waist | 3 |
| Degrees of freedom of the arm | 5 |
| Degrees of freedom of the hand | 7 (optional force control for three-fingered hand + 2 additional degrees of freedom for the wrist) |
| Dex3-1 Hand Parameters | thumb: 3 active degrees of freedom, index finger: 2 active degrees of freedom, middle finger: 2 active degrees of freedom |
| Optional installation of touch sensors | Yes |
| Joint bearings | industrial cross roller bearings with high precision and high load capacity |
| Joint motors | PMSM permanent magnet synchronous motors with a low-inertia internal rotor |
| Maximum knee joint torque | 120 N*m |
| Maximum load on the arm | about 3 kg |
| Calf and thigh length | 0.6 m |
| Arm span | about 0.45 m |
| Waist range of motion | Z ±155°, X ±45°, Y ±30° |
| Knee range of motion | from 0° to 165° |
| Hip range of motion | P ±154°, R from -30 to 170°, Y ±158° |
| Wrist range of motion | P ±92.5°, Y ±92.5° |
| Full internal cable management | Yes |
| Joint encoder | double encoder |
| Cooling system | local air cooling |
| Battery type | 13-cell lithium-ion battery |
| Basic computing power | High-performance 8-core processor |
| Sensors and communications | depth camera + 3D LiDAR |
| 4-microphone array | Yes |
| Loudspeaker | 5 in |
| Wireless connectivity | WiFi 6, Bluetooth 5.2 |
| High-performance computing module | Nvidia Jetson Orin |
| Quick-connect battery | Yes |
| Battery capacity | 9000 mAh |
| Charger | 54V / 5A |
| Manual controller | Yes |
| Working time | about 2 hours |
| OTA updates | Yes |
| Possibility of further development | Yes |
| Dimensions in standing position | 1320 x 450 x 200 mm |
| Dimensions when folded | 690 x 450 x 300 mm |
| Weight with battery | over 35 kg |
| Comparison of G1 Edu Versions | ||||
|---|---|---|---|---|
| Model | DOF | Hands | Tactile Sensors | |
| G1 Edu U1 | 23 | none | no | |
| G1 Edu U2 | 29 | none | no | |
| G1 Edu U3 | 43 | 2 x Dex3-1 | no | |
| G1 Edu U4 | 43 | 2 x Dex3-1 | yes | |
| G1 Edu U5 | 41 | 2 x RH56DFQ | no | |
| G1 Edu U6 | 41 | 2 x RH56DFTP | yes - 17 sensors / hand | |
| G1 Edu U7 | 41 | 2 x Revo 2 Basic | no | |
| G1 Edu U8 | 37 | 2 x Dex3-1 | no | |
| G1 Edu U9 | 37 | 2 x Dex3-1 | yes - 33 sensors / hand | |
| G1 Edu U10 | 35 | 2 x Revo 2 Basic | no | |
Useful links |
| Niebezpieczne | Equipment |
Be the first to ask a question about this product!